German engineer Jens Altenburg’s solar-powered hidden observing vehicle system (SOPHECLES) is an innovative gas-detecting mobile robot. When the Texas Instruments MSP430-based mobile robot detects noxious gas, it transmits a notification alert to a PC, Altenburg explains in his article, “SOPHOCLES: A Solar-Powered MSP430 Robot.” The MCU controls an on-board CMOS camera and can wirelessly transmit images to the “Robot Control Center” user interface.

Take a look at the complete SOPHOCLES design. The CMOS camera is located on top of the robot. Radio modem is hidden behind the camera so only the antenna is visible. A flexible cable connects the camera with the MSP430 microcontroller.
Altenburg writes:
The MSP430 microcontroller controls SOPHOCLES. Why did I need an MSP430? There are lots of other micros, some of which have more power than the MSP430, but the word “power” shows you the right way. SOPHOCLES is the first robot (with the exception of space robots like Sojourner and Lunakhod) that I know of that’s powered by a single lithium battery and a solar cell for long missions.
The SOPHOCLES includes a transceiver, sensors, power supply, motor
drivers, and an MSP430. Some block functions (i.e., the motor driver or radio modems) are represented by software modules.How is this possible? The magic mantra is, “Save power, save power, save power.” In this case, the most important feature of the MSP430 is its low power consumption. It needs less than 1 mA in Operating mode and even less in Sleep mode because the main function of the robot is sleeping (my main function, too). From time to time the robot wakes up, checks the sensor, takes pictures of its surroundings, and then falls back to sleep. Nice job, not only for robots, I think.
The power for the active time comes from the solar cell. High-efficiency cells provide electric energy for a minimum of approximately two minutes of active time per hour. Good lighting conditions (e.g., direct sunlight or a light beam from a lamp) activate the robot permanently. The robot needs only about 25 mA for actions such as driving its wheel, communicating via radio, or takes pictures with its built in camera. Isn’t that impossible? No! …
The robot has two power sources. One source is a 3-V lithium battery with a 600-mAh capacity. The battery supplies the CPU in Sleep mode, during which all other loads are turned off. The other source of power comes from a solar cell. The solar cell charges a special 2.2-F capacitor. A step-up converter changes the unregulated input voltage into 5-V main power. The LTC3401 changes the voltage with an efficiency of about 96% …
Because of the changing light conditions, a step-up voltage converter is needed for generating stabilized VCC voltage. The LTC3401 is a high-efficiency converter that starts up from an input voltage as low as 1 V.
If the input voltage increases to about 3.5 V (at the capacitor), the robot will wake up, changing into Standby mode. Now the robot can work.
The approximate lifetime with a full-charged capacitor depends on its tasks. With maximum activity, the charging is used after one or two minutes and then the robot goes into Sleep mode. Under poor conditions (e.g., low light for a long time), the robot has an Emergency mode, during which the robot charges the capacitor from its lithium cell. Therefore, the robot has a chance to leave the bad area or contact the PC…
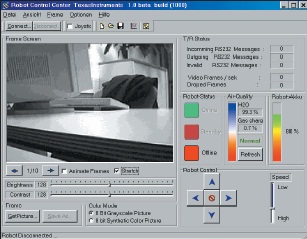
The control software runs on a normal PC, and all you need is a small radio box to get the signals from the robot.
The Robot Control Center serves as an interface to control the robot. Its main feature is to display the transmitted pictures and measurement values of the sensors.
Various buttons and throttles give you full control of the robot when power is available or sunlight hits the solar cells. In addition, it’s easy to make short slide shows from the pictures captured by the robot. Each session can be saved on a disk and played in the Robot Control Center…



The entire article appears in Circuit Cellar 147 2002. Type “solarrobot” to access the password-protected article.