FS20-Sprachsensor FS20 SS – Spracherkennungs-Grundlagen Teil 1/2
Aus ELVjournal
01/2006
0 Kommentare
Allgemeines
Die
Erkennung von Sprache ist ein sehr komplizierter Vorgang, denn im
Gegensatz zu einem Tastendruck, der praktisch 100 % zuverlässig erkannt
werden kann, wird ein Wort selbst von ein und demselben Sprecher nie
zweimal exakt gleich ausgesprochen. Die vom Stimmorgan produzierten
Schallwellen können sich bei jedem Sprechvorgang sogar erheblich
voneinander unterscheiden. Weiterhin ist die Stimme jedes einzelnen
Menschen so individuell wie sein Fingerabdruck, es gibt keine zwei exakt
gleichen Stimmen. Und als ob das alleine nicht die Spracherkennung
schon schwierig genug machen würde, gibt es dann noch die unzähligen
Nebengeräusche und die akustischen Eigenschaften der Umgebung, denn wir
befinden uns ja normalerweise nicht im reflexionsfreien und
schallisolierten Tonstudio. Zudem enthalten praktisch alle Sprachen
Homophone, d. h. Wörter mit gleichem Klang, aber verschiedener Bedeutung
(Meer / mehr). Es gibt also gleich eine ganze Menge von Gründen, die
die Spracherkennung erschweren. Aber betrachten wir doch zunächst
einmal, was beim Sprechen bzw. Hören geschieht.Spracherzeugung
Der
menschliche Stimmapparat ist ein hochkomplexes Organ. Die
Grundschwingung wird durch die Stimmlippen im Kehlkopf erzeugt, die
umgangssprachlich auch oft als Stimmbänder bezeichnet werden. Mehrere
Muskeln können die Masse, Länge und Spannung der Stimmlippen
beeinflussen. Zusammen mit der durchströmenden Luftmenge aus der Lunge
können wir damit eine sehr große Bandbreite hinsichtlich der Tonhöhe und
der Lautstärke der Stimme erzeugen. Die Frequenz der Grundschwingung
beim Sprechen liegt im Durchschnitt bei rund 120 Hz bei Männern und ca.
250 Hz bei Frauen. Eine Hochgeschwindigkeitsaufnahme der schwingenden
Stimmlippen kann man unter http://www.iis.fraunhofer.de/medtech/med_bild/stilip/index_d.html sehen.

|
| Bild 1: Ansicht der menschlichen Stimmorgane |
Doch
neben den Vokalen, die auch als stimmhaft bezeichnet werden, gibt es
noch eine Vielzahl weiterer Laute, die zur Artikulation von Sprache
notwendig sind. Die stimmlosen Laute entstehen im Mund- oder Nasenraum.
Grob gruppieren kann man sie in Frikative, welches Zischlaute wie S, F,
oder Sch sind, die durch Luftverwirbelungen an Engstellen erzeugt
werden, sowie in Plosive wie P, T oder K, die durch komplette
Blockierung und plötzliches, „explosives“ Freigeben des Luftweges durch
Zunge und Lippen entstehen. In der Phonetik und Phonologie werden diese
Laute als Phone bezeichnet. Im Internationalen Phonetischen Alphabet
(IPA) sind 95 phonetische Zeichen als Unicode definiert, mit denen alle
Laute aller menschlichen Sprachen genau beschrieben werden können.
Zusätzlich gibt es noch eine Vielzahl von Betonungszeichen als
Ergänzung. Ein Phon (hier übrigens nicht zu verwechseln mit der
Maßeinheit für die Lautstärke) ist das kleinste Lautelement einer
sprachlichen Äußerung. Demgegenüber ist ein Phonem die kleinste
bedeutungsunterscheidende Einheit eines Sprachsystems. Ein Phonem kann
aus mehreren Phonen bestehen. Während also ein Phon lediglich einen Laut
bezeichnet, unabhängig vom Sinn eines Wortes, wird die Bedeutung eines
Wortes durch die Abfolge von Phonemen charakterisiert (Beispiel: Bein
und Pein). Jede Sprache der Welt verwendet nur einen Ausschnitt von
Phonen und Phonemen. Im Deutschen gibt es z. B. nicht das englische th,
was beim korrekten Aussprechen häufig zu größeren Schwierigkeiten führt.
Im Englischen gibt es dagegen nicht das ch in „Acht“. Hören

|
| Bild 2: Die Anordnung des menschlichen Hörorgans |
Das
Außenohr (Ohrmuschel und Gehörgang) erlaubt uns eine Richtungsortung
von Schallquellen. Das Mittelohr (Trommelfell und die Gehörknöchelchen
Hammer, Amboss und Steigbügel) dient der Transformation der akustischen
Information vom Außen- zum Innenohr. Dort schließlich wird in der
Gehörschnecke die akustische Information in Nervenreize umgesetzt, die
dann im Gehirn analysiert werden. Vereinfacht gesagt, findet in der
flüssigkeitsgefüllten Gehörschnecke eine Zerlegung in die einzelnen
Frequenzbestandteile des hörbaren Spektrums (20 Hz bis 16.000 Hz) statt.
Der Schall wird vom Steigbügel auf die Lymphflüssigkeit innerhalb der
Schnecke übertragen und läuft dort als Wanderwelle entlang der
Basilarmembran. Eine bestimmte Frequenz erzeugt ein Auslenkungsmaximum
an einer bestimmten Stelle der Membran, was die dort befindlichen
Sinneshärchen reizt und die Nervenimpulse erzeugt, die vom Hörnerv zum
Gehirn geleitet werden. Das menschliche Gehör kann unglaubliche
Leistungen vollbringen. Es ist nicht nur das Sinnesorgan mit der
höchsten spektralen Auflösung innerhalb der erkennbaren Bandbreite, es
hat auch einen enormen Dynamikbereich vom leisesten wahrnehmbaren
Schalldruck (etwa 20 μ-Pascal, das entspricht 0 dBSPL; SPL=Sound Pres -
sure Level) bis zur Schmerzgrenze von 120 dBSPL, was dem millionenfachen
Schalldruck entspricht. Technische Spracherkennung
Bei
der elektronischen Spracherkennung muss zwischen verschiedenen Arten
von Systemen unterschieden werden. Da gibt es zum einen die PC-gestützte
Erkennung, die vorzugsweise für Diktierprogramme verwendet wird.
Normalerweise kommt dabei ein Headset zum Einsatz. Zum anderen gibt es
„Embedded Systems“ mit integrierter Sprachsteuerung, die im Wesentlichen
zur Bedienung von Geräten per Sprachkommandos eingesetzt werden. Obwohl
grundsätzlich immer ein Vergleich von zunächst unbekannten Geräuschen
mit einem bekannten Vokabular erfolgt, gibt es zwischen den
Diktiersystemen und der Kommandosteuerung erhebliche Unterschiede,
sowohl bei den Anforderungen an die Funktionsweise als auch an die dafür
notwendigen Systemressourcen.Diktiersysteme
Kennzeichnend
für ein Diktiersystem sind vor allem das sehr große Vokabular und die
direkte Umwandlung von Sprache in Text für die weitere Bearbeitung.
Idealerweise umfasst es sämtliche Wörter einer Sprache und evtl. auch
noch gängige, fremdsprachliche Begriffe. Gute Diktierprogramme arbeiten
heute mit symantischer Analyse, d. h., es wird versucht, anhand
statistischer Regeln den Sinn von Sätzen zu interpretieren, um zusammen
mit grammatikalischen Regeln und Modellen die Wörter in sinnvolle
Zusammenhänge zu bringen und offensichtlich sinnlose Wortfolgen zu
korrigieren. Die Basis dieser Diktiersysteme stellt in jedem Fall eine
Phonemerkennung dar. Aus der erkannten Phonemfolge wird dann aus einem
umfangreichen Wörterbuch eine Auswahl möglicher Wörter getroffen, von
denen anhand von Semantik- und Grammatikregeln das wahrscheinlichste
Wort ausgewählt wird. Heutige Diktierprogramme arbeiten nur dann
einigermaßen gut, wenn gewisse Randbedingungen erfüllt sind: In der
Regel ist ein Training auf die Stimme des Benutzers notwendig, das aus
dem Vorlesen eines dem System bekannten Textes besteht. Erkennungsfehler
sollten vom Benutzer möglichst sofort korrigiert werden, weil die
Programme daraus lernen können. Die Bedienung erfordert eine ruhige
Umgebung und ein Mikrofon in unmittelbarer Mundnähe (Headset).
Diktierprogramme erfordern leistungsfähige Rechner und viel Speicher.
Sie sind nicht dafür geeignet, aus größerer Entfernung oder in lauter
Umgebung bedient zu werden.Kommandoerkenner
Im
Gegensatz zu den Diktiersystemen dient ein Kommandoerkenner dazu, ein
Kommandowort aus einem begrenzten Satz vorgegebener Wörter zu erkennen.
Das Kommando löst dann eine bestimmte Aktion aus, z. B. das Einschalten
einer Lampe oder die Wahl einer Telefonnummer. Die Sprache wird hierbei
nicht in Text umgewandelt. Ziel ist vor allem die möglichst zuverlässige
Erkennung von Kommandos auch in schwierigen Umgebungen, z. B. mit
Hintergrundgeräuschen oder aus größerer Entfernung. Die Natur dieser
Systeme setzt oft auch sehr enge Grenzen für die Kosten – sprich den
Hardware-Aufwand, der für die Erkennung zur Verfügung steht. Wer würde
für seine sprachgesteuerte Nachttischlampe extra einen PC aufstellen?
Auch der Leistungshunger solcher embedded Spracherkenner darf mit
Hinblick auf ökologische und wirtschaftliche Aspekte nur sehr gering
sein, definitiv um Größenordnungen kleiner als der eines PCs. Die
Betrachtung von PC-gestützten Diktiersystemen ist sicherlich
interessant, vor allem, weil sich die Technologie zurzeit noch sehr
stark entwickelt und längst noch nicht ausgereizt ist. Für den
Elektroniker sind aber vor allem die „kleinen“ Systeme interessant, weil
sich damit eine Vielzahl von Geräten, die bisher nur mit Schaltern und
Reglern bedient werden konnten, in Zukunft durch Sprachkommandos steuern
lassen. Und damit kommen wir dem Science- Fiction-Feeling schon ein
ganzes Stück näher. Doch wie schafft es ein kleiner Mikrocontroller
eigentlich, eine so komplexe Aufgabe wie die Erkennung von Sprache
durchzuführen, und was steckt an Technologie dahinter? Am Beispiel des
Spezial-ICs RSC4128 des Herstellers Sensory wollen wir uns die Funktion
der Spracherkennung einmal im Detail anschauen. Sprache, das ist aus
akustischer Sicht der zeitliche Verlauf eines Frequenzgemisches. Die
Bandbreite natürlicher Sprache liegt im Bereich von ca. 100 Hz bis 8000
Hz. Die häufig zu lesende Definition der Sprachbandbreite von 300 Hz bis
3000 Hz reicht zwar für eine einigermaßen verständliche Telefonqualität
aus, aber durch diese Beschneidung vor allem der hohen Frequenzen gehen
wichtige Informationen verloren, z. B. die Unterscheidbarkeit von F und
S, was beim Buchstabieren am Telefon häufig zu Missverständnissen
führt.Am
Anfang jeder Spracherkennung steht zunächst einmal die Umwandlung der
akus tischen Schwingungen in digital verarbeitbare Signale. Die
Schallwellen werden von einem Mikrofon in elektrische Signale
umgewandelt. Ein regelbarer Verstärker sorgt für eine Anpassung an
unterschiedliche Lautstärken, so dass der nachfolgende A/D-Wandler im
optimalen Bereich arbeiten kann. Dort erfolgt die Digitalisierung der
Analog-Signale. Für einen guten Dynamikbereich sollte der A/D-Wandler
mindestens 12 Bit Auflösung haben, besser sind 16 Bit. Die Samplerate
muss so hoch gewählt werden, dass die volle Bandbreite der Sprache
ausgewertet werden kann. Der RSC4128 arbeitet mit knapp 20.000 Samples
pro Sekunde bei 16 Bit Auflösung, so dass die analysierbare
Audio-Bandbreite bis 10 kHz reicht bei einer Dynamik von 96 dB
(theoretisch). Um nun geeignete Merkmale des Audio- Signals für die
Spracherkennung zu gewinnen, muss das komplexe Frequenzgemisch in seine
spektralen Bestandteile zerlegt werden. Dies erfolgt durch eine digitale
Filterung des Datenstroms, und hier liegt einer der Schlüssel für den
folgenden Mustervergleich: Die Erkennung soll ja möglichst zeitnah mit
dem Sprechen des Kommandos erfolgen. Die Verarbeitung muss also in
Echtzeit erfolgen und ist somit durch die zur Verfügung stehende
Rechenleistung des Prozessors limitiert. Für eine ausreichend gute
Erkennung brauchen wir keine allzu große Feinheit der spektralen
Zerlegung. Eine „echte“ Fourier-Transformation wäre nicht nur viel zu
rechenaufwändig, sondern auch unnötig. Was wir brauchen, ist eine
schnelle Extraktion von den Schlüsselmerkmalen der Sprache. Schlüsselmerkmale

|
| Bild 3: Filterkurve eines Spracherkenners |
Wenn
wir nun in ausreichend kleinen Zeitabschnitten die akustische Leistung
und die dominierende Frequenz in jedem der Bänder ermitteln, können wir
ein Muster generieren, das anschließend mit bekannten Mustern verglichen
werden kann. Dies ist auch das Grundprinzip der Spracherkennung im
ELV-Sprachsensor. Damit die akustischen Veränderungen bei der
Phonembildung erfasst werden können, genügt es, die Leistung und die
Dominanzfrequenz in Zeitintervallen von <30 ms zu erfassen. Damit
steht genügend Zeit zur Verfügung, um die Merkmale auch mit begrenzter
Rechenleistung zu extrahieren. Digitale Filterung
Der
RSC4128 verwendet für die Zerlegung in die Frequenzbänder eine Reihe
von rekursiven Gleichungen, wie sie auch in DSPs benutzt werden. Im
Unterschied zu einem „echten“ DSP sind diese Gleichungen jedoch in
Hardware codiert, weil dies im Gegensatz zu frei programmierbaren DSPs
eine wesentlich effizientere Chipausnutzung ermöglicht. Eine
detaillierte Beschreibung der Vorgänge innerhalb des Filters würde den
Rahmen dieses Beitrags sprengen, so mathematisch komplex und theoretisch
sind sie. Als Ergebnis der umfangreichen Rechnungen werden in
speziellen Registern die Ausgangsinformationen aller digitalen Filter
für die weitere Verarbeitung zwischengespeichert.Prozessorarchitektur
Der
Mikroprozessor holt alle 50 μs die digital gefilterten Werte aus den
Registern ab. Die vier Hauptaufgaben des Prozessors sind:
- Analyse der gefilterten Eingangswellenform, um in Echtzeit ein Muster
zu erzeugen, das die signifikanten akustischen Informationen des
Eingangssignals enthält
- Ausführung einer Mustererkennung, um festzustellen, welches Kommando
aus einem bekannten Set von Wörtern erkannt wurde und wie hoch die
Wahrscheinlichkeit der Erkennung ist
- Synthese von Sprachmeldungen an den Benutzer - Ausführung jenes
Anwendungsprogramms, das die Funktion des Gerätes bestimmt, in das der
Prozessor eingebaut istBlockbildung
Die
niedrigen Frequenzbänder werden dazu verwendet, um die zeitlichen
Grenzen des Audio-Signals zu bestimmen. Außerdem werden alle Bänder
bezüglich der Signalleistung und der Anzahl der Nulldurchgänge
analysiert. Dies erfolgt in zeitlichen Blöcken von ca. 25 ms. Die Anzahl
der Nulldurchgänge ist ein Maß für die dominierende Grundfrequenz
innerhalb eines Frequenzbandes. Als Merkmal für die Mustererzeugung
berechnet der Prozessor den Logarithmus der Nulldurchgangsrate. Die
Bestimmung der effektiven Leistung würde normalerweise eine
Fast-Fourier-Transformation benötigen oder eine Summierung der Quadrate
der Amplituden aller Datenpunkte, verbunden mit einer enormen Anzahl von
Multiplikationen. Der RSC4128 verwendet ein anderes, patentiertes
Verfahren, um die Signalleistung näherungsweise zu bestimmen. Dabei ist
nur die Summierung der absoluten Amplitudenwerte nötig. Ein Vergleich
des Logarithmus des „echten“ Effektivwertes mit dem Logarithmus der
absoluten Amplituden zeigt eine ausreichende Übereinstimmung bei
Eingangssignalamplituden von 5 bis 160 dB. Bei der 8-Bit-Auflösung der
ermittelten Werte sind die Abweichungen vernachlässigbar für die
Mustererkennung.Normalisierung
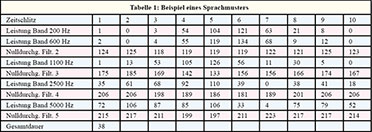
Ausgehend
von den Stilleperioden, die das Sprachkommando umrahmen, nimmt der
Prozessor nun eine Normalisierung der Werte vor. Dabei wird durch
Interpolation bzw. Extrapolation das Geräusch auf eine fest vorgegebene
Anzahl von Stützpunkten zeitlich gestreckt bzw. gestaucht. Die
Lautstärke wird ebenfalls normalisiert, um unterschiedlich laute
Aussprache und unterschiedliche Mikrofondistanzen auszugleichen. Die
ermittelten Dominanzfrequenzen und Signalleistungen für jeden Stützpunkt
und jedes Frequenzband werden nun in Form einer Matrix als Muster
zwischengespeichert und der Mustererkennung zugeführt. Tabelle 1 zeigt
ein Muster, das beim Sprechen des Wortes „sechs“ erzeugt wurde.Anschaulicher
wird dieses Muster, wenn man z. B., wie in Abbildung 4, die
Signalleistungen der einzelnen Bänder über die Zeit aufträgt. Es lässt
sich dabei gut erkennen, wie am Anfang und am Ende des Wortes die
Leistung im hohen Frequenzbereich ansteigt, während der Vokal E nur im
mittleren Wortteil bei den niedrigen Frequenzen eine deutliche Leistung
erzeugt. Ein weiterer Parameter des Musters ist der Logarithmus der
Gesamtdauer des Geräu sches. Die Extraktion der Merkmale ist hier zur
Veranschaulichung vereinfacht dargestellt. Der RSC4128 hat eine noch
etwas feinere Aufgliederung der Frequenzbänder. Insgesamt besteht ein
Muster aus 256 Werten. Aus der immer noch relativ geringen Zahl von
Werten lässt sich leicht schließen, dass eine vollständige
Rekonstruktion des Eingangssignals nicht mehr möglich ist. Man würde
allenfalls einen wenig verständlichen, roboterhaften „Vokoder“- Klang
erreichen. Aber die Reproduktion ist ja auch nicht das Ziel des ganzen
Aufwands. Für die Spracherkennung ist die Größe der Muster völlig
ausreichend und sogar vorteilhaft, denn zu viele Stützpunkte würden
nicht nur die notwendige Rechenzeit für die Erkennung unnötig
verlängern, dies würde auch die Erkennungsperformance verschlechtern,
weil die Variationen bei wiederholter Aussprache und Nebengeräuschen zu
stark ins Gewicht fallen würden. 
|
| Bild 4: Die Signalleistungen der einzelnen Bänder, übertragen auf die Zeit |
Mustererkennung

|
| Bild 5: Die vereinfachte Struktur des neuronalen Netzes |
Die
Neuronen des Eingangslayers (grün) werden mit dem bei der
Sprachvorverarbeitung erzeugten Muster angeregt. Jedes Neuron eines
tiefer gelegenen Layers hat Verbindungen zu jedem Neuron des darüber
liegenden Layers oder sogar auch layerübergreifende Verbindungen. Jede
dieser Verbindungen hat ein eigenes, so genanntes Gewicht, das positiv
(stimulierend), negativ (hemmend) oder neutral sein kann. Die Summe
aller Eingangsreize bewirkt in jedem Neuron eine spezifische Aktivität
seiner Ausgänge, die wiederum mit anderen Neuronen vernetzt sind. Das
Wissen des Netzwerkes ist in den Gewichten seiner Verbindungen
gespeichert. So pflanzt sich eine Anregung der Eingangsneuronen entlang
der Aktivierungsrichtung durch die verborgenen Layer bis zu den
Ausgangsneuronen fort. Damit solch ein Netzwerk ein Muster zu einer
bestimmten Antwortklasse zuordnen kann, muss es trainiert werden. Beim
Training passiert nichts anderes, als dass die Verbindungen des Netzes
neu gewichtet werden. Der eigentliche Erkennungsvorgang eines
trainierten Netzes ist nunmehr kein deterministisches und transparentes
Verfahren mehr, sondern unterliegt den Regeln der
Wahrscheinlichkeitsrechnung. Diese Methode ist sehr effektiv, um eine
tolerante Mustererkennung durchzuführen, bei der das „richtige“
Zielmuster, also ein korrekt gesprochenes Wort, durchaus Unterschiede im
Detail zum trainierten Muster aufweisen darf, solange die
Gesamtcharakteristik übereinstimmt. Sprecherunabhängige Spracherkennung
Ein
neuronales Netz eignet sich sehr gut für die sprecherabhängige
Erkennung, d. h., wenn das Netz mit der Stimme des Benutzers trainiert
werden kann, so dass das Zielmuster mit dem zu erkennenden Muster eine
hohe Ähnlichkeit hat. Für eine gute sprecherunabhängige Erkennung ist
jedoch noch etwas mehr Aufwand erforderlich. Statt ein komplettes
Wortmuster zu erkennen, wird das neuronale Netz hierbei dazu benutzt, um
eine Phonemerkennung durchzuführen. Das Netz wird dazu lediglich mit
den spezifischen Phonemen für eine bestimmte Sprache trainiert, z. B.
für Deutsch oder für Englisch. Der Ausgang des neuronalen Netzes liefert
nun, solange gesprochen wird, einen kontinuierlichen Strom von
„Phonemwahrscheinlichkeiten“ an die nächste Verarbeitungsstufe, die aus
der Abfolge von Phonemen mittels einer Viterbi-Suche (eine
Lösungsmethode der Hidden-Markov-Modellierung) eine Zuordnung zu
bestimmten, vorgegebenen Kommandos vornimmt. Nur so ist es möglich, die
Kommandos für einen bestimmten Einsatzzweck aufgrund ihrer
Phonemschreibweise zu erkennen.
|
| Bild 6: Das Prinzip des Hidden- Markov- Modells |
Es bedeuten:
x - (verborgene) Zustände des Markov- Modellsa - Übergangswahrscheinlichkeiten b - Emissionswahrscheinlichkeiten y - (sichtbare) Ausgabesymbole In
unserer speziellen Aufgabenstellung entsprechen die y-Werte den vom
neuronalen Netz erkannten Phonemfolgen. Die x-Werte entsprechen den
bekannten Phonemfolgen der vorgegebenen Kommandowörter. Durch Analyse
und Vergleich der Übergangs- und der Emissionswahrscheinlichkeiten
bestimmt der Viterbi-Algorithmus nun das wahrscheinlichste Kommandowort,
das der beobachteten Phonemfolge entspricht. Wir haben es also bei der
sprecherunabhängigen Erkennung mit einem hybriden, zweistufigen Prozess
zu tun: In der ersten Stufe erfolgt eine Vorklassifizierung von
Geräuschen in Phoneme und in der zweiten Stufe wird die erkannte
Phonemabfolge mit der von bekannten Kommandowörtern verglichen, um eine
Übereinstimmung zu erkennen. Natürlich muss auch die Viterbi- Suche
fehlertolerant sein, weil ja die Eingangsdaten, also der Phonemstrom,
nur eine begrenzte Zuverlässigkeit aufweisen. Systemarchitektur
Wie
sich aus der Beschreibung der komplizierten Prozesse vielleicht schon
erahnen lässt, ist ein enormer Aufwand an mathematischen Berechnungen
nötig, um eine Spracherkennung durchzuführen. Ein gewöhnlicher
8-Bit-Prozessor wäre dazu allein keinesfalls in der Lage. Man braucht
schon mindestens einen DSP und einen 32-Bit-Mikrocontroller, um die
intensive Mathematik auf konventionellem Wege schnell genug
durchzuführen. Ein solches System ist aber trotz drastischem
Preisverfall auch heute noch aufwändig und zu teuer für
Consumer-Anwendungen. Durch eine clevere Systemarchitektur ist es aber
dennoch möglich, alle diese Aufgaben in einem kleinen, preiswerten
8-Bit-Controller zu integrieren. Abbildung 7 zeigt das Blockdiagramm des
RSC4128.
|
| Bild 7: Das Blockdiagramm des RSC4128 |
Für
die sehr rechenintensiven und zeitkritischen, aber sich immer
wiederholenden Aufgaben, wie z. B. digitale Filterung und
Vektormultiplikation, wurden spezielle Funktionsblöcke in Silizium
gegossen, die dem Prozessor so viel Arbeit abnehmen, dass die restlichen
Aufgaben mit Leichtigkeit von einem 8-Bit-System verarbeitet werden
können. Der RSC4128 zeichnet sich dadurch aus, dass er einen
Prozessorkern beinhaltet, der dem bekannten 8051 sehr ähnlich ist. Die
Registerarchitektur wurde jedoch neben einigen Special-Function-
Registern (SFR) für die Audio-Vorverarbeitung dahingehend erweitert,
dass der Prozessor Multitasking-fähig ist, um die Mustererzeugung und
die Erkennungsalgorithmen quasi parallel in Echtzeit durchführen zu
können. Dies ist sehr wichtig, damit keine wesentlichen Audio-Signale
während der Verarbeitung anderer Aufgaben verloren gehen. Weiterhin
beinhaltet der Chip einen Mikrofonvorverstärker, einen A/D-Wandler und
einen D/A-Wandler, damit er auch in der Lage ist, Sprachausgaben für die
Interaktion mit dem Benutzer zu erzeugen. Ein PWMAusgang kann sogar
direkt zur Ansteuerung kleiner Lautsprecher benutzt werden. RAM ist als
Arbeitsspeicher ebenso enthalten wie Timer, Watchdog und
Powermanagement. Die Firmware kann im internen ROM untergebracht werden
oder optional auch in einem externen Speicher-Baustein. Zur
Kommunikation mit der Außenwelt hat der RSC4128 24 I/O-Leitungen, die
frei programmierbar sind. Sprachsteuerung für das FS20- Funk-Schaltsystem
In
der nächsten Ausgabe des „ELVjournals“ wird eine Sprachsteuerung für
das FS20-Funk-Schaltsystem vorgestellt, mit der es möglich ist, bis zu 4
verschiedene Geräte ganz einfach per Sprachkommando zu schalten und
sogar zu dimmen. Damit wird dann wirklich ein Teil Science-Fiction zur
Realität!Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (6 Seiten)
als PDF (6 Seiten)
Sie erhalten folgende Artikel:
- FS20-Sprachsensor FS20 SS – Spracherkennungs-Grundlagen Teil 1/2
| weitere Fachbeiträge | Foren | |
Hinterlassen Sie einen Kommentar:


 Videos
Videos







{kind=link}