 Videos
Videos
- Foren
- Technik-News
- Wissen
- FAQ-Datenbank
- Batterien, Akkus, Ladegeräte
- Bausätze, Lernpakete, Literatur
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic Components
- Hausautomation - Smart Home
- Haustechnik
- Kfz-Elektronik
- Klima-Wetter-Umwelt
- Messtechnik
- Modellsport, Freizeit
- Multimedia-SAT-TV
- Netzgeräte, Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkstatt, Labor
- Ratgeber
- Batterien - Akkus - Ladegeräte
- Bausätze
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic-Components
- Freizeit- und Outdoortechnik
- Hausautomations-Systeme
- Haustechnik
- Kfz-Technik
- Klima - Wetter - Umwelt
- Messtechnik
- Multimedia - Sat - TV
- Netzgeräte - Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkzeug - Löttechnik
- Elektronikwissen
- So funktioniert´s
- Praxiswissen
- FAQ-Datenbank
- Fachbeiträge
- ELVintern
- Experten testen
- Praxiswissen
- So funktioniert´s
- Hausautomation - Smart Home
- Haustechnik
- Beleuchtung
- Sicherheitstechnik
- Klima - Wetter - Umwelt
- Computer/Netzwerk
- Multimedia - Sat - TV
- Telefon - Kommunikation
- Kfz-Technik
- Stromversorgung
- HomeMatic-Know-how
- Freizeit- und Outdoortechnik
- Werkzeug - Löttechnik
- Messtechnik
- Fachmagazin & Abo

Artikel: 0 Summe: 0,00 EUR
Funk-Bewegungsmelder für Außeneinsatz FS20 PIRA


Aus ELVjournal 02/2006
0 Kommentare






Bausatzinformationen
 |  |  |  |
| 2 | 1,25 | OK | 2/06 |
Technische Daten
| Stromversorgung | Batterien, 2 x LR01/Lady |
| Batterielebensdauer | ca. 1 Jahr bei 1000 x Senden täglich |
| PIR-Erfassungswinkel | 90° |
| PIR-Reichweite | ca. 6 m |
| Funktionskontrolle | LED |
| Sendefrequenz | 868,35 MHz |
| Funkreichweite | bis 100 m (Freifeld) |
| Linsen-Durchmesser | 13 mm |
| Abmessungen (B x H x T) | 52 x 50 x 35 mm |
Der FS20 PIRA vereinigt als universell einsetzbarer Bewegungsmelder mehrere sehr praktische Eigenschaften in einem Gerät: Er ist sehr kompakt, wasserdicht, damit für den Außeneinsatz geeignet, batteriebetrieben, somit vielerorts einsetzbar, und er gibt seine Erfassungsmeldung per Funk an beliebige Empfänger des FS20-Systems weiter. Damit steht diesem System ein völlig autark arbeitender Funk-Bewegungsmelder zur Verfügung, der zudem mit der einstellbaren Helligkeitsschwelle den vollen Funktions- umfang abdeckt, der von einem hochwertigen PIR-Bewegungsmelder erwartet wird.
Flexibler Melder
Das wohl am häufigsten anzutreffende Einsatzgebiet für handelsübliche PIR-Bewegungsmelder ist das Schalten von Außenleuchten. Dabei werden die bekannten Vorzüge eines PIR-Bewegungsmelders voll ausgenutzt: Die Außenleuchte wird sowohl beim Verlassen des Hauses als auch bei der Rückkehr durch die vom menschlichen Körper abgegebene Wärme- bzw. Infrarotstrahlung eingeschaltet. Die weitere Elektronik sorgt dafür, dass dies, wenn gewünscht, nur im Dunkeln erfolgt und die Leuchte nach einer gewissen Zeit wieder automatisch abgeschaltet wird. So wird auch für Gäste die Umgebung beleuchtet, so dass diese sicher an die Haustür gelangen können. Ungebetene Gäste wiederum werden durch das plötzlich einschaltende Licht abgeschreckt.Die Vorteile liegen auf der Hand: Gerade im Freien, wo das Verlegen von Leitungen und das Anbringen von Lichtschaltern oft schwierig oder gar nicht möglich ist, können PIR-Bewegungsmelder ohne großen Aufwand eingesetzt werden. Diese können auch, geschützt angebracht, die Vandalismussicherheit gegenüber normalen Wandschaltern erhöhen.
Ein
weiteres Einsatzgebiet von PIR-Bewegungsmeldern ist die Sicherheits-
und Überwachungstechnik. So gehört zu einer Alarmanlage üblicherweise
immer mindestens ein PIR-Bewegungsmelder. In wirtschaftlich schwierigen
Zeiten befürchtet manch einer einen Anstieg der Kriminalität, gerade
wenn sein eigenes Hab und Gut in einer sozial problematischen Gegend
liegt. In solchen oder ähnlichen Fällen wird auch gern zur
Kameraüberwachung gegriffen. Dank der CCD-Technik für
Überwachungskameras sind diese inzwischen erschwinglich geworden und
auch die Aufzeichnung der Bilder mittels PC oder Festplattenrecorder (z.
B. ELV AVC 720) wird entsprechend der Preisentwicklung von Computern
und Zubehör immer preiswerter. Zum Automatisieren dieser
Kamera-Aufzeichnung sind PIR-Bewegungsmelder ebenfalls gut geeignet.
Die meisten Bewegungsmelder haben jedoch auch einen für manche
Einsatzzwecke gravierenden Nachteil – sie sind fest an das Vorhandensein
eines Netzstromanschlusses gebunden, über den auch gleichzeitig die
Last geschaltet wird. Damit sind sie nicht wirklich flexibel einsetzbar.
Bereits mit dem Konzept zum Mini-Bewegungsmelder PIR 13, im „ELVjournal“ 6/2003 detailliert beschrieben, haben wir die Grundlage für einen Bewegungsmelder gelegt, der über lange Zeit mit sehr wenig Strombedarf ortsunabhängig betrieben werden kann.
Eine Komplett-Applikation dieses kleinen Moduls stellt nun der hier vorgestellte FS20 PIRA dar. Dieser verfügt über die übliche Funktionalität eines PIR-Bewegungsmelders, bietet aber durch seinen leitungsunabhängigen Betrieb noch mehr Möglichkeiten. So reduziert sich der Installationsaufwand für das Automatisieren einer Außenleuchte allein schon dadurch, dass keine Leitung verlegt werden muss. Lediglich in den Lastkreis muss ein Funkempfänger/Schalter des FS20-Systems eingefügt werden, was jedoch in den allermeisten Fällen problemlos möglich ist.
Falls die Positionierung des FS20 PIRA zunächst nicht den gewünschten Erfassungsbereich abdeckt, kann er ohne Probleme an einen anderen Ort versetzt werden, ohne hässliche Bohrlöcher, Kabelenden u. Ä. zu hinterlassen.
Den FS20 PIRA kann man auch ganz flexibel, ohne ihn zu befestigen, an wechselnden Orten aufstellen. So kann man beispielsweise versuchen, Schlupflöcher zu finden, durch die Marder ins Haus gelangen, durch den Garten streunende Katzen und Hunde abschrecken usw. Beim Überwachen von Tieren ist allerdings zu beachten, dass die Empfindlichkeit von der Größe, Temperatur und Bewegungsgeschwindigkeit des zu überwachenden Objektes abhängig ist.
Die Aufzeichnung der Bilder von Überwachungskameras kann mit dem FS20 PIRA u. U. entscheidend verbessert werden. Bei der Überwachung mittels PC oder Festplattenrecorder wird oft der Bildinhalt auf Bewegung überwacht und bei einer erkannten Bewegung die Aufnahme gestartet. Dies kann zu Problemen führen, wenn bei tief stehender Sonne die Schatten von Bäumen oder bei Wind die Bewegung von Pflanzen und Blättern erfasst werden. Auch ohne Wind gibt es manchmal das Problem, dass eine Aufzeichnung zu spät beginnt. So bekommt man beispielsweise ein Auto auf der Auffahrt zu sehen, kann aber nicht erkennen, aus welcher Richtung es gekommen ist. Wenn man aber den Funk-Bewegungsmelder FS20 PIRA über einen passenden FS20-Empfänger mit dem Schalteingang von PC oder Festplattenrecorder verbindet, kann man bequem verschiedene Erfassungsbereiche ausprobieren und den FS20 PIRA letztendlich am optimalen Ort befestigen. Außerdem gibt es beim Einsatz eines PIR-Bewegungsmelders weniger Probleme mit Fehlauslösungen durch Pflanzen und andere bewegliche Gegenstände, deren Temperatur sich nicht von der Umgebungstemperatur unterscheidet.
Neben diesen praktischen Aufgaben bietet der FS20 PIRA auch Möglichkeiten für interessante Lichteffekte. Beim Einsatz mehrerer FS20 PIRA und passender Anordnung von Leuchten z. B. kann die Beleuchtung einer Person quasi „folgen“. So etwas kann übrigens auch jene stark verunsichern, die ungebeten auf das Grundstück kommen …
Schließlich kann der FS20 PIRA auch durch seine in das FS20-Konzept eingebundene Funktionalität zwei verschiedene Schaltbefehle auf zwei Kanälen aussenden. Einfaches Beispiel: Der Bewegungsmelder soll beim Heimkommen unabhängig von der Tageszeit immer die Beleuchtung in der Garage einschalten, die Außenbeleuchtung aber nur bei Dunkelheit – ohne Probleme mit dem FS20 PIRA lösbar! Die Funktionsweise des PIR-Sensors selbst wurde, wie erwähnt, im „ELVjournal“ 6/2003 bereits ausführlich erklärt, weshalb wir an dieser Stelle darauf verzichten wollen. Ein Blick in die technischen Daten des FS20 PIRA zeigt die wesentlichen Eckdaten des Bewegungsmelders auf.
Bereits mit dem Konzept zum Mini-Bewegungsmelder PIR 13, im „ELVjournal“ 6/2003 detailliert beschrieben, haben wir die Grundlage für einen Bewegungsmelder gelegt, der über lange Zeit mit sehr wenig Strombedarf ortsunabhängig betrieben werden kann.
Eine Komplett-Applikation dieses kleinen Moduls stellt nun der hier vorgestellte FS20 PIRA dar. Dieser verfügt über die übliche Funktionalität eines PIR-Bewegungsmelders, bietet aber durch seinen leitungsunabhängigen Betrieb noch mehr Möglichkeiten. So reduziert sich der Installationsaufwand für das Automatisieren einer Außenleuchte allein schon dadurch, dass keine Leitung verlegt werden muss. Lediglich in den Lastkreis muss ein Funkempfänger/Schalter des FS20-Systems eingefügt werden, was jedoch in den allermeisten Fällen problemlos möglich ist.
Falls die Positionierung des FS20 PIRA zunächst nicht den gewünschten Erfassungsbereich abdeckt, kann er ohne Probleme an einen anderen Ort versetzt werden, ohne hässliche Bohrlöcher, Kabelenden u. Ä. zu hinterlassen.
Den FS20 PIRA kann man auch ganz flexibel, ohne ihn zu befestigen, an wechselnden Orten aufstellen. So kann man beispielsweise versuchen, Schlupflöcher zu finden, durch die Marder ins Haus gelangen, durch den Garten streunende Katzen und Hunde abschrecken usw. Beim Überwachen von Tieren ist allerdings zu beachten, dass die Empfindlichkeit von der Größe, Temperatur und Bewegungsgeschwindigkeit des zu überwachenden Objektes abhängig ist.
Die Aufzeichnung der Bilder von Überwachungskameras kann mit dem FS20 PIRA u. U. entscheidend verbessert werden. Bei der Überwachung mittels PC oder Festplattenrecorder wird oft der Bildinhalt auf Bewegung überwacht und bei einer erkannten Bewegung die Aufnahme gestartet. Dies kann zu Problemen führen, wenn bei tief stehender Sonne die Schatten von Bäumen oder bei Wind die Bewegung von Pflanzen und Blättern erfasst werden. Auch ohne Wind gibt es manchmal das Problem, dass eine Aufzeichnung zu spät beginnt. So bekommt man beispielsweise ein Auto auf der Auffahrt zu sehen, kann aber nicht erkennen, aus welcher Richtung es gekommen ist. Wenn man aber den Funk-Bewegungsmelder FS20 PIRA über einen passenden FS20-Empfänger mit dem Schalteingang von PC oder Festplattenrecorder verbindet, kann man bequem verschiedene Erfassungsbereiche ausprobieren und den FS20 PIRA letztendlich am optimalen Ort befestigen. Außerdem gibt es beim Einsatz eines PIR-Bewegungsmelders weniger Probleme mit Fehlauslösungen durch Pflanzen und andere bewegliche Gegenstände, deren Temperatur sich nicht von der Umgebungstemperatur unterscheidet.
Neben diesen praktischen Aufgaben bietet der FS20 PIRA auch Möglichkeiten für interessante Lichteffekte. Beim Einsatz mehrerer FS20 PIRA und passender Anordnung von Leuchten z. B. kann die Beleuchtung einer Person quasi „folgen“. So etwas kann übrigens auch jene stark verunsichern, die ungebeten auf das Grundstück kommen …
Schließlich kann der FS20 PIRA auch durch seine in das FS20-Konzept eingebundene Funktionalität zwei verschiedene Schaltbefehle auf zwei Kanälen aussenden. Einfaches Beispiel: Der Bewegungsmelder soll beim Heimkommen unabhängig von der Tageszeit immer die Beleuchtung in der Garage einschalten, die Außenbeleuchtung aber nur bei Dunkelheit – ohne Probleme mit dem FS20 PIRA lösbar! Die Funktionsweise des PIR-Sensors selbst wurde, wie erwähnt, im „ELVjournal“ 6/2003 bereits ausführlich erklärt, weshalb wir an dieser Stelle darauf verzichten wollen. Ein Blick in die technischen Daten des FS20 PIRA zeigt die wesentlichen Eckdaten des Bewegungsmelders auf.
Bedienung
 |
Funktionskontrolle
 |
Einstellungen
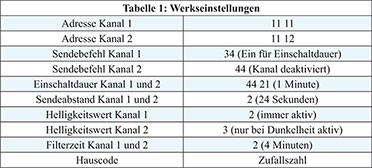
Die Funktionalität des Funk-Bewegungsmelders FS20 PIRA lässt sich dank umfangreicher Einstellmöglichkeiten sehr gut an die jeweiligen Anforderungen anpassen. Die Einstellmöglichkeiten werden im Folgenden beschrieben, auf eine genaue Beschreibung des FS20-Adress-Systems verzichten wir hier jedoch aus Platzgründen, sie ist in der mitgelieferten Bedienungsanleitung zu finden. Die Werkseinstellungen (siehe Tabelle 1) wurden, wie gesagt, so gewählt, dass der FS20 PIRA für übliche Schaltaufgaben sofort einsetzbar ist.Alle Einstellungen werden mittels der Taster S 1 bis S 4 vorgenommen. Zur Kontrolle der Eingabe leuchtet oder blinkt die LED. Die einzelnen Einstellmöglichkeiten, die auch als Übersicht in Tabelle 2 aufgeführt sind, wollen wir im Folgenden jeweils kurz erläutern.
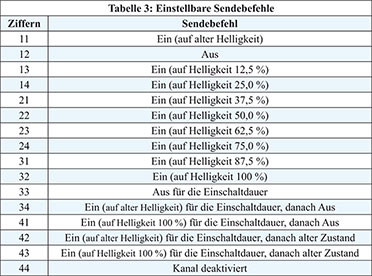
Sendebefehl festlegen/Kanal (de)aktivieren
 |
Einschaltdauer
 |
Beispiel (Werkseinstellung):
Einschaltzeit: 1 Minute
Eingabe: 44 21 = 15 * 4 s = 60 s
Nach vollständiger Eingabe der Ziffern mit den zugehörigen Tasten verlischt die LED.
Sendeabstand
Der Sendeabstand verhindert unnötiges Auslösen in zu kurzen zeitlichen Abständen – so genügt eben ein einzelner Sendebefehl, um etwa eine Lampe für die programmierte Sendezeit einzuschalten. Hat man z. B. eine Einschaltdauer von 1 Minute gewählt, genügt es, einen Sendeabstand von 24 Sekunden einzustellen, um zu erreichen, dass die Lampe eingeschaltet bleibt, falls man sich immer noch im Erfassungsbereich des Sensors befindet. Ein langer Sendeabstand kann die Batterielebensdauer entscheidend erhöhen, da insgesamt weniger oft gesendet wird. Die Einstellung ist wieder nach Tabelle 2 für den gewünschten Kanal aufzurufen. Als Bestätigung beginnt die LED zu blinken.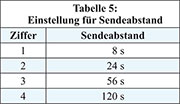 |
Helligkeitswert
Hier wird die Schaltgrenze zwischen „Hell“ und „Dunkel“ für beide Kanäle oder für jeden Kanal einzeln eingestellt. Die Schaltgrenze für den jeweils gewählten Kanal wird anhand der aktuellen Umgebungshelligkeit festgelegt. Aufgerufen wird die Einstellung gemäß Tabelle 2. Falls beide Kanäle auf den gleichen Wert eingestellt werden sollen, kann innerhalb der Wartezeit von 1 Minute nach Aufrufen des einen Kanals (solange die LED leuchtet) die Taste des anderen Kanals gedrückt gehalten werden. Die Wartezeit beginnt dann wieder bei einer Minute. Innerhalb der Wartezeit muss das Gehäuse des FS20 PIRA geschlossen werden, um den Einfluss des Gehäuseunterteils in die Feststellung des aktuellen Helligkeitswertes mit einzubeziehen. Nach Ablauf der Wartezeit erlischt die LED und eine Helligkeitsmessung wird durchgeführt (Messung innerhalb 1 Sekunde). Dabei darf der Sensor nicht abgeschattet oder direkt beleuchtet sein, um einen realen Wert zu ermitteln.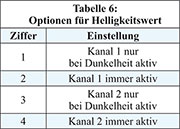 |
Filterzeit
Die Filterzeit legt fest, wie lange die Umgebungshelligkeit über dem eingestellten Schwellwert liegen muss, bis der Zustand „Hell“ erkannt wird und in der Einstellung „Schalten bei Dunkel“ nicht mehr geschaltet wird. Je länger diese Zeit ist, desto länger dauert es, bis ausreichende Helligkeit über dem eingestellten Grenzwert erkannt wird, die Umschaltung wird „träger“. |
Adressen und Hauscode einstellen
Arbeitet der FS20 PIRA zusammen mit dem zugehörigen Empfänger als einziges FS20-System, ist keine gesonderte Adressierung erforderlich, es genügt die Werks-einstellung mit dem zufällig generierten Hauscode. Sobald man jedoch mehrere FS20-Geräte in Betrieb hat, die vielleicht auch vernetzt werden sollen, etwa über eine der FS20-Zentralen oder Handfernbedienungen, sollte man unbedingt die Adressierungs-Konventionen des FS20-Systems beachten und einhalten. Diese finden sich detailliert in der mitgelieferten Bedienungsanleitung. Auch hier erfolgt der Aufruf gemäß Tabelle 2, die LED blinkt. Darauf werden die entsprechenden Adressierungseingaben über die vier Tasten vorgenommen, und nach Eingabe der letzten Ziffer verlischt die LED.Timeset
Soll der vom Funk-Bewegungsmelder FS20 PIRA angesteuerte Empfänger auch von anderen Sendern (z. B. Handfernbedienungen des FS20-Funk-Schaltsystems) unter Nutzung des internen Timers bedient werden, so ist der interne Timer des Empfängers wie folgt zu programmieren: Das Tastenpaar des Kanals, der dem zu programmierenden Empfänger zugeordnet ist, wird für mindestens 1 Sekunde (kürzer als 5 Sekunden) gleichzeitig gedrückt. Hierüber wird die Timer-Zeitmessung zunächst gestartet und nach Ablauf der gewünschten Zeit auch wieder beendet. Während der Zeitmessung blinkt die LED des Empfängers. Für die eigentliche Programmierung der Timer gelten die Hinweise in den jeweils zugehörigen Bedienungsanleitungen der Empfänger. Die programmierbare Einschaltdauer der Sendebefehle 33 bis 43 hat Vorrang vor der internen Timereinstellung des Empfängers. Um mit dem Funk-Bewegungsmelder FS20 PIRA die interne Timer-Zeit des Empfängers zu nutzen, ist ein Sendebefehl zwischen 11 und 32 zu wählen.Werkseinstellungen
Wenn der FS20 PIRA wieder in den Auslieferungszustand versetzt werden soll, können die Werkseinstellungen (siehe Tabelle 1) wiederhergestellt werden. Dazu sind die Tasten S 2 und S 4 gleichzeitig für 5 Sekunden gedrückt zu halten, bis die Programmier-LED blinkt. Anschließend bestätigt man die Übernahme der Werkseinstellungen mit einer beliebigen Taste. Achtung: Beim Übernehmen der Werks-einstellungen wird automatisch ein neuer Hauscode erzeugt, so dass anschließend entweder der alte Hauscode wieder eingestellt werden muss oder die Empfänger neu anzulernen sind. Kommen wir nun zur Schaltungsbeschreibung des FS20 PIRA.Schaltung
Sensorplatine
 |
| Bild 1: Schaltbild der Sensorplatine des Funk-Bewegungsmelders FS20 PIRA |
Der zweite Sensor auf der Platine ist der Pyro-Sensor PIR 1. Seine Betriebsspannung erhält der Sensor gefiltert durch den Widerstand R 1, die Kondensatoren C 6, C 7 und C 8 und den Elko C 9. Am Ausgang des Sensors ist der Arbeitswiderstand R 2 angeschlossen, über den sich die Spannung beim Detektieren einer Bewegung im Bereich von einigen µV verändert. Dieses Signal wird in den 2 Stufen des Operationsverstärkers IC 1 verstärkt und gefiltert. Die erste Stufe ist als nicht invertierender Verstärker beschaltet, dessen Verstärkung von den Widerständen R 4 und R 5 bestimmt wird. Zusammen mit dem Elko C 13 und dem Kondensator C 14 arbeitet diese Stufe als Bandpass.
 |
| Bild 2: Frequenzgang des Verstärkers |
Der Durchlassbereich von 0,5 Hz bis 10 Hz ist ausgelegt für die zu erwartenden Bewegungsgeschwindigkeiten der zu erfassenden Objekte. Frequenzanteile außerhalb dieses Bereichs sollen möglichst nicht verstärkt werden, da es sich dabei nicht um Nutzsignale, sondern eher um Störungen handelt.
Das so aufbereitete Signal wird nun auf einen Fensterkomparator (IC 2 ) gegeben. Mit dem Spannungsteiler aus den Widerständen R 9 bis R 12 wird ein Spannungsfenster über den Widerständen R 10 und R 11 erzeugt. Im Ruhezustand liegt das Rauschen des Pyro-Sensors hinter dem Verstärker innerhalb dieses Spannungsfensters. Wenn eine Bewegung erfasst wird, ändert sich die Spannung am Pyro-Sensor und das verstärkte Signal verlässt den Fensterbereich, so dass der jeweilige Komparator einen High-Pegel ausgibt. Die übrigen Kondensatoren, der Widerstand R 3 und der Elko C 3 dienen der Störsicherheit und zum Filtern der Versorgungsspannung.
Controllerplatine
 |
| Bild 3: Schaltbild der Controllerplatine des Funk-Bewegungsmelders FS20 PIRA |
Beim Schließen eines Tasters stellt sich ein Low-Pegel am Mikrocontroller ein, so dass der jeweilige Tastendruck ausgewertet werden kann. Für optische Rückmeldungen wird die Programmier- und Signal-LED D 101 über den Vorwiderstand R 102 angesteuert.
Der interne Analog-Digital-Wandler des Mikrocontrollers wird zum einen für das Messen der Batteriespannung und zum anderen für die Helligkeitsmessung benutzt. Die Kondensatoren C 101 und C 102 filtern dazu die Betriebs- und Referenzspannung des A/D-Wandlers. Zum Messen der Helligkeit wird der interne Pull-up-Widerstand mit dem Anschlusspin des Helligkeitssensors verbunden. Eine Helligkeitsmessung findet etwa jede Minute statt. Nach jeder Messung wird der Anschlusspin des Helligkeitssensors wieder auf Low-Pegel geschaltet, um Strom zu sparen. Der parallel geschaltete Kondensator C 103 soll das Signal des Helligkeitssensors vor hochfrequenten Störungen schützen. Die Versorgungsspannung für den PIR-Teil der Sensorplatine liefert der Mikrocontroller direkt aus einem Anschlusspin, der Controller bewältigt die geringe Stromaufnahme der PIR-Schaltung mühelos. Wenn die PIR-Schaltung nicht benötigt wird, schaltet der Controller sie ab, um Strom zu sparen. Dies ist z. B. dann der Fall, wenn alle aktiven Kanäle auf „nur bei Dunkelheit“ eingestellt sind, die Umgebung aber gerade hell ist. Der Widerstand R 103 sorgt dafür, dass im normalen Betrieb kein ungewollter Reset ausgelöst wird. Für einen sauberen Power-on-Reset verfügt der Mikrocontroller über eine interne Schaltung.
Stromversorgung
Die Schaltung wird mit 2 Batterien LR01/Lady versorgt. Die Versorgungsspannung von +3 V wird außerdem mit dem Elko C 107 und den Kondensatoren C 106 und C 108 gefiltert.Nachbau
 |
| Bild 4: Schnittzeichnung des FS20 PIRA zur Orientierung für die Montage |
Sensorplatine
Hier werden zuerst die Elkos C 3, C 9, C 13 und C 15 von der Lötseite her bestückt. Dabei ist auf die gekennzeichnete Polarität der Elkos zu achten (Minusmarkierung am Gehäuse). Dabei sind die Elkos C 3 und C 9 so zu montieren, dass sie auf der Platine innerhalb des im Bestückungsdruck gekennzeichneten Bereichs aufliegen. Die Elkos C 13 und C 15 liegen auf einigen SMD-Bauteilen, sollten aber so bestückt werden, dass sie parallel zur Platine liegen (siehe auch Platinenfoto).Als Nächstes müssen die Stifte ST 1 bis ST 5 von der Lötseite her montiert werden. Die Stifte müssen genau senkrecht in der Platine verlötet werden, damit sie später exakt in die Bohrungen der Controllerplatine passen. Diese kann auch während des Verlötens als Positionierungshilfe verwendet werden. Die Kunststoffstücke der Stifte müssen auf der Sensorplatine aufliegen. Das Kunststoffstück von ST 2 ist danach vom Stift zu entfernen, damit man diesen später mit dem Funkmodul verlöten kann.
Auf der Bestückungsseite erfolgt jetzt die Bestückung des Fotowiderstandes LDR 1. Die Anschlussbeinchen sollten so weit wie möglich durch die Platine gesteckt werden, damit der Fotowiderstand möglichst dicht an der Platine sitzt.
Zuletzt ist der Pyro-Sensor PIR 1zu bestücken. Dieser wird zusammen mit dem Unterteil der PIR-Linse auf der Bestückungsseite eingesetzt. Es ist darauf zu achten, dass die Fensterfläche des Sensors nicht mit den Fingern berührt wird, da Schmutz und Fettablagerungen die Empfindlichkeit des Sensors einschränken. Der Pyro-Sensor muss zusammen mit dem Unterteil der Linse plan auf der Platine aufliegen. Nach dem Verlöten wird die Linsenkappe aufgesetzt, wobei die unterschiedlich breiten Nasen der Kappe mit den entsprechenden Kerben des Unterteils übereinstimmen müssen.
Controllerplatine
Die SMD-Bauteile der Controllerplatine sind ebenfalls vorbestückt, so dass gleich mit dem Bestücken der bedrahteten Bauteile begonnen werden kann. Als Erstes wird das Sendemodul HFS 101 eingebaut. Dessen 3 Stifte sind von der Bestückungsseite her so weit durch die zugehörigen Bohrungen zu stecken, bis das Sendemodul plan auf dem Gehäuse des Mikrocontrollers IC 101 aufliegt. In dieser Lage werden die Stifte auf der Lötseite angelötet und die überstehenden Enden anschließend möglichst nah an der Platine abgeschnitten. Alle Stifte, die unterhalb des Batteriehalters enden, dürfen nach dem Abschneiden nicht höher sein als der Schaumstoff-Klebestreifen, mit dem der Batteriehalter später befestigt wird.Nun wird der Elko C 107 bestückt. Die Kennzeichnung der Polarität ist dabei zu beachten. Die Programmier- und Signal-LED D 101 kann wahlweise auf der Bestückungsseite oder auf der Lötseite montiert werden. Von der Bestückungsseite her ist die LED später auch von außen sichtbar. Falls das z. B. für Überwachungszwecke unerwünscht ist, empfiehlt sich die Montage auf der Lötseite. In jedem Fall ist die Polarität der LED zu beachten: Der längere Anschluss ist die Anode und gehört in die mit „+“ markierte Bohrung.
Als Nächstes sind nun die Taster für die Bestückung auf dem Platinenrand vorzubereiten. Deren Anschlussbeinchen werden zunächst auf eine Länge von je ca. 4 mm gekürzt, so dass sie nicht über die zugehörigen Lötflächen hinausragen. Beim Verlöten ist darauf zu achten, dass die Tastergehäuse am Platinenrand anliegen, damit die Platine zusammen mit den Tastern später auch ins Gehäuse passt und die Kräfte, die beim Drücken auf die Taster ausgeübt werden, direkt auf die Platine übertragen werden können und nicht die Lötstellen belasten.
An dieser Stelle darf das Batteriefach noch nicht aufgeklebt werden. Mit einer provisorischen 3-V-Spannungsversorgung kann man die Grundfunktionen der Platine aber schon prüfen, indem man einen FS20-Empfänger anlernt und mit den Tasten ein- und ausschaltet.
Endmontage
Sensorplatine und Controllerplatine müssen jetzt zusammengefügt werden, indem man die Stifte der Sensorplatine sorgfältig in die zugehörigen Bohrungen der Controllerplatine einsetzt. Die Platinen sind parallel zueinander auszurichten. Außerdem muss zwischen den Platinen ein gleichmäßiger Abstand von 6 mm eingehalten werden (siehe Abbildung 4). In dieser Lage stehen die Stifte auf der Lötseite der Controllerplatine noch ausreichend weit über, so dass man die Stifte hier nun verlöten kann. Der Massestift ST 2 muss zusätzlich mit dem Sendemodul verlötet werden. Die Lötstelle ist von oben zu erreichen. Nach Kontrolle und ggf. erneutem Kürzen der überstehenden Stiftenden erfolgt nun das Befestigen des Batteriehalters mit dem Schaumstoff-Klebestreifen. Auch hier ist die Positionierung wieder sehr präzise vorzunehmen. Der Batteriehalter muss entsprechend der Markierung auf der Platine zentriert werden, so dass er an der flachen Seite der Controllerplatine genauso weit übersteht wie seine Ecken auf der gegenüberliegenden Seite. Der Überstand beträgt jeweils ca. 0,7 mm. Bevor der Batteriehalter also richtig festgedrückt wird, sollte ausprobiert werden, ob die Schaltung in die Gehäuse-Unterschale passt. Das Innere des Gehäuses weist eine schmale und eine etwas breitere Seite auf, auch wenn beide auf den ersten Blick gleich groß erscheinen. Die Taster müssen in Richtung Gehäuseaufdruck weisen.Wenn die Schaltung sauber ins Gehäuse passt, wird der Batteriehalter gut angedrückt und anschließend mit Silberdraht angeschlossen. Die Lötfahnen des Batteriehalters kann man dazu etwas hochbiegen, so dass der Silberdraht durch die Löcher der Lötfahnen in die zugehörigen Bohrungen der Controllerplatine gesteckt werden kann. Überstehende Enden sind nach dem Verlöten abzuschneiden.
Damit ist der FS20 PIRA bereit für eine Funktionskontrolle, wie sie im Abschnitt „Bedienung“ erklärt ist.
Gehäuseeinbau
Die Schaltung wird mit der PIR-Linse und einer Dichtung im Gehäusedeckel befestigt. Bei Wartungs- und Programmierarbeiten kann so der Deckel samt Schaltung vom Gehäuseunterteil abgenommen werden. Das hat besonders dann Vorteile, wenn das Unterteil fest verschraubt angebracht ist. Zuerst ist die Streufolie vorzubereiten. Dazu sind die Kanten an den gestrichelten Linien senkrecht hochzufalten. Ein Lineal kann dabei helfen, die Kanten genau gerade zu falten. Die Folie soll später vom Rand des Dichtrings in der Mitte festgehalten werden.Da auch im Deckel die Seiten nicht genau gleich lang sind, sollte jetzt zunächst ohne Dichtring ausprobiert werden, in welcher Lage die Folie und auch die Schaltung in den Deckel passen. Wenn man die jeweils richtige Lage ermittelt hat, können die Teile zusammen mit dem Dichtring in den Deckel montiert werden. Diese Arbeit erweist sich möglicherweise als etwas diffizil, da der Dichtring (der ja später eine perfekte Abdichtung gegen Wasser sichern soll) sich nur sehr schwer über die PIR-Linse stülpen lässt. Gleichzeitig muss aber auch die Streufolie sauber unter dem Rand des Dichtrings mit festgehalten werden. Ein Tipp zur einfacheren Montage: den Dichtring auf der Innenseite mit etwas Spülmittel benetzen, um die Gleitfähigkeit zu verbessern. Alternativ kann man auch die Kappe der PIR-Linse abnehmen und diese zunächst ohne die Schaltung im Deckel montieren.
Allerdings kann die Linse nach dem Einsetzen im Deckel nicht mehr gedreht werden. Sie muss also genau so eingesetzt werden, dass die Nasen der Kappe später wieder in die richtigen Kerben des Unterteils passen, weshalb die erste Montagemethode besser sein dürfte. An sie wird man sich später erinnern, falls man aus irgendeinem Grund die Schaltung einmal vom Gehäusedeckel entfernen muss – einfach abziehen, ohne zu verdrehen, und später einfach wieder in die Kappe einsetzen.
Wenn die Schaltung schließlich im Deckel befestigt ist, wird getestet, ob diese Einheit auch ins Gehäuseunterteil passt.
Zuletzt ist noch die Neopren-Dichtung einzusetzen, die den Gehäusedeckel zum Gehäuseunterteil hin abdichtet. Die Dichtung wird sorgfältig in die entsprechende Nut des Deckels eingelegt und muss am Ende noch auf die richtige Länge gekürzt werden. Dabei ist unbedingt darauf zu achten, dass die Dichtung nicht zu kurz abgeschnitten wird. Außerdem muss der Schnitt genau senkrecht verlaufen, damit Anfang und Ende der Dichtung in der Nut bündig aneinander liegen.
Wenn der FS20 PIRA frei aufgestellt werden soll, kann das Gehäuse jetzt geschlossen werden, ansonsten ist zuerst das Gehäuseunterteil am gewünschten Installationsort mit zwei Schrauben in den beiden Gehäuseecken zu befestigen.



 |
| Ansicht der fertig bestückten Sensorplatine des FS20 PIRA mit zugehörigem Bestückungsplan, oben von der Bestückungsseite, unten von der Lötseite |

 |
| Ansicht der fertig bestückten Controllerplatine des FS20 PIRA mit zugehörigem Bestückungsplan, oben von der Bestückungsseite, unten von der Lötseite |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen: als Online-Version
als Online-Version als PDF (8 Seiten)
als PDF (8 Seiten)Sie erhalten folgende Artikel:
- Funk-Bewegungsmelder für Außeneinsatz FS20 PIRA
- 1 x Journalbericht
- 1 x Schaltplan
| Produkte | Foren |
Hinterlassen Sie einen Kommentar:


