TouchWheel TW 128 – auf Tuchfühlung bedient!
Aus ELVjournal
02/2006
0 Kommentare
Technische Daten
| Spannungsversorgung | 5 VDC |
| Stromaufnahme | 2 mA |
| Auflösung | 128 Schritte/ 360° |
| Abmessungen (B x H x T) | 70 x 32 x 53 mm (inkl. Frontplatte) |
Das
TouchWheel TW128 dient als Inkrementalgeber-Ersatz. Hierbei werden die
Impulse jedoch nicht durch mechanische Betätigung erzeugt, sondern durch
Kapazitätsänderung beim Berühren der Frontplatte. Hierdurch ist es
möglich, gekapselte, vandalismussichere Drehgeber zu bauen, die eine
Vielzahl von Aufgaben lösen können. Durch seine Open-Collector-Ausgänge
ist das TW128 universell einsetzbar und kann auch bestehende
Inkrementalgeber ersetzen.Gefühltes „Poti“
")
|
| Bild 1: Bereits weit verbreitet – berührungsempfindliche Tasten, hier für ein Haushaltsgerät (Foto: Quantum) |
")
|
| Bild 2: Pendant zum Drehsteller: Berührungssensor in Schiebereglerform – die QSlide-Serie (Foto: Quantum) |
")
|
| Bild 3: Berührungssensoren sind hervorragend für die Hinterleuchtung geeignet (Foto: Quantum) |

|
| Bild 4: Der TW 128 bildet exakt das Signalverhalten eines Inkrementalgebers ab. |
Wie funktioniert’s?

|
| Die Anschlussbelegung eines Inkrementalgebers |
Schaltung

|
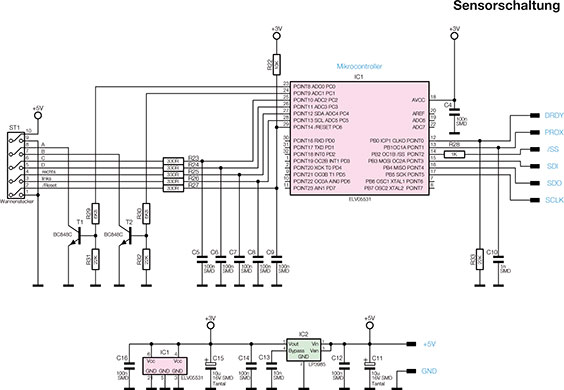
| Bild 5: Die Gesamtschaltung des TW 128, oben die Sensor-, unten die Controllerschaltung |
Die
Schaltung (Abbildung 5) besteht aus zwei Teilen, dem Sensor- (oben) und
dem Controllerteil (unten), die über die bereits erwähnte
SPI-Schnittstelle verbunden sind. Jeder Teil verfügt über eine eigene
Aufbereitung der Spannungsversorgung. Sensorschaltung
Hier
ist der detaillierte Aufbau des Touch Wheels zu sehen. Rechts befindet
sich die Sensorfläche TW 1 mit den zwischen den einzelnen Abschnitten
der Ring-Elektrode geschalteten Widerständen R 1 bis R 18. Die
RC-Kombinationen C 1/R 19, C 2/ R 20 und C 3/R 21 bilden jeweils einen
Tiefpass, der Störfelder von den empfindlichen Sensoreingängen
fernhalten soll. Die Hauptfunktion von C 1 bis C 3 ist jedoch der
Messwertabgleich mit den Eigenschaften des Touch Wheels. Dessen
Empfindlichkeit ist abhängig von der Dicke und dem Material des Panels
vor dem Sensor. Das beste Material ist dünnes Glas, das schlechteste
dicker Kunststoff (max. 3 mm). Die hier gewählten Werte für die so
genannten „charge-sensing sample“-Kondensatoren ist ein durch die
Hersteller- Applikationsvorschrift empfohlener Wert, der auf das hier
verwendete Panel abgestimmt ist. Während des Betriebes wird periodisch
eine Drift-Kompensation ausgeführt (zur Kompensierung von Temperatur-
und Luftfeuchtigkeitsschwankungen). Die Kommunikation zwischen dem
Sensor- Schaltkreis IC 3 und dem auswertenden und steuernden Prozessor
IC 1 erfolgt über die bereits erwähnte SPI-Schnittstelle, zu der die
Anschlüsse SDI (serial data input), SDO (serial data output), SCLK
(serial clock input) sowie zusätzlich die Leitung SS (slave select)
gehören. „Input/ Output“ bezieht sich immer auf den Sensor- Schaltkreis.
Während über die drei erstgenannten Busleitungen der normale
Datenverkehr zwischen IC 1 und IC 3 abgewickelt wird, gehört es zu den
Eigenheiten des SPI, dass der jeweilige Busteilnehmer (Slave) über die
SS-Leitung angesprochen wird. Ist der QT 510 bereit zur
Datenübermittlung, geht die Ready-Leitung DRDY auf „high“ und
signalisiert dem Controller, dass die Datenabfrage beginnen kann.
Zusätzlich übermittelt die Leitung PROX ein High-Signal, wenn eine
Kapazitätsänderung (also z. B. das Berühren von TW 1 mit einem Finger)
stattfindet. IC 4 erzeugt aus der 5-V-Versorgungsspannung eine stabile
3-V-Spannung für IC 3. Die Kondensatoren C 17 bis C 20 dienen der
Siebung und Störunterdrückung, C 21 blockt Störungen unmittelbar an IC 3
ab.Controllerschaltung
Hier
befindet sich der Mikrocontroller IC 1 als auswertendes und steuerndes
Zentrum der Schaltung. Auf der Sensor- bzw. SPI-Seite sorgen C 10 und R
28 für die Unterdrückung von Störungen auf den entsprechenden Leitungen,
R 33 legt die DRDY-Leitung bei Inaktivität auf Low-Pegel. C 4
unterdrückt Störungen auf der Betriebsspannungsleitung unmittelbar am
Controller. R 22 dient einem sicheren Start des Controllers beim
Einschalten der Betriebsspannung. Die RC-Glieder R 23/C 5 bis R 27/C9
fungieren als Störunterdrückung auf den Leitungen zu ST 1. Die beiden
Open-Collector-Transistorstufen mit T 1 und T 2 stellen den direkten
Ersatz der beiden Inkrementalgeber-Kontakte dar. Sie wurden gewählt, um
auch Geräte mit anderen Betriebsspannungen als 3 V, der Betriebsspannung
des Controllers, ansteuern zu können. Wollen wir jetzt einmal die
einzelnen Ausgangssignale und ihre Funktion betrachten:
- A und B:Hier
arbeiten die beiden eben diskutierten Open-Collector-Ausgangsstufen,
die jeweils einen der Inkrementalgeber- Kontakte ersetzen. Bei
Betätigung an TW 1 im Uhrzeigersinn wird erst A (T 1) und danach B (T 2)
auf Masse gezogen (siehe auch die entsprechenden Oszillogramme in
Abbildung 4). Bei Betätigung gegen den Uhrzeigersinn hingegen erfolgt
die Ansteuerung der Transistoren in umgekehrter Reihenfolge (siehe auch
hierzu die Oszillogramme in Abbildung 4).
- C und D:
Diese beiden Ausgänge reagieren wie A und B, führen jedoch alternativ zu
A und B 3-V-Logikpegel. Sie können zur direkten Ansteuerung eines
externen Controllers dienen, sofern dieser ebenfalls 3-V-Logikpegel
verarbeiten kann.
- rechts: Bei Betätigung von TW 1 im
Uhrzeigersinn erscheint an diesem Ausgang bei jedem der 128 möglichen
Schritte für ca. 8 ms High-Pegel.
- links: Bei Betätigung
von TW 1 gegen den Uhrzeigersinn erscheint an diesem Ausgang bei jedem
der 128 möglichen Schritte für ca. 8 ms High-Pegel. An die beiden
Ausgänge C/D sowie „links/rechts“ können auch Kontroll- LEDs direkt
angeschlossen werden, in diesem Fall fungieren R 23 bis R 26 als
LED-Vorwiderstände.
- Reset-Eingang: Der Eingang „Reset“
ist low-aktiv. Wird dieser auf „low“ gezogen, erfolgt ein Reset des
Controllers IC 1. Dieser startet dann auch den QT 510 neu. Nach dem
Einschalten bzw. einem Reset führt der QT 510 eine automatische
Kalibrierung durch. Während dieser Kalibrierung sollte das TW128 sich in
der später gewünschten Lage befinden und nicht berührt werden.
Die
3-V-Stromversorgung mit IC 2 und C 11 bis C 15 entspricht der der
Sensorschaltung und erzeugt hier die 3-V-Betriebsspannung für IC 1.

|
| Bild 6: Die Montage der Lötstifte in der Basisplatine – Einsetzen bis zum Stopp-Kragen und auf der Bestückungsseite verlöten |

|
| Bild 7: Die Lötstifte dürfen nicht durch die Sensorplatine ragen. |
Nun
erfolgt das Aufkleben der Frontplatte auf die Leiterseite der
Sensorplatine mittels doppelseitigem Klebeband. Bevor man daran geht,
sollte man sich die Abbildungen 8 und 9 ansehen. 
|
| Bild 8: Montage der Sensorplatine auf der Frontplatte – sie muss genau in den Markierungen der Frontplatte sitzen |

|
| Bild
9: Frontplatte und Platine müssen wie gezeigt so montiert werden, dass
sich Bedienfeld und Wannenstecker auf der rechten Seite befinden. |
Hier
erkennt man, dass die Sensorplatine genau innerhalb der
gekennzeichneten Markierungen der Frontplatte zu platzieren ist und dass
die Bedienflächen-Bedruckung der Frontplatte (heller Kreis) auf der
Seite zu positionieren ist, auf der auch die Sensorfläche liegt. Dies
kann man auch gut daran erkennen, dass auf dieser Seite der
Wannenstecker auf der Basisplatine sitzt. Damit ist die Montage des TW
128 abgeschlossen. Zum Schluss noch einige Hinweise zur Montage des
Flachbandkabels auf den in den Wannenstecker zu steckenden
Pfostenverbinder. Eine Seite des Flachbandkabels tenverbinders langsam
und vorsichtig zusammengequetscht. Das überstehende Kabelende schneidet
man mit einem scharfen Messer direkt am Stecker ab. Zur Identifi-
zierung von Pin 1 ist am Pfostenverbinder eine kleine Markierung
angebracht. Inbetriebnahme
Bei
der Inbetriebnahme des TW 128 ist zu beachten, dass das Gerät sich
dabei in der späteren Gebrauchslage und, wenn möglich, der endgültigen
Umgebung befinden muss und einige Sekunden nicht berührt werden sollte,
um ein ordnungsgemäßes Kalibrieren zu ermöglichen. Das erfolgt nach
jedem Zuschalten der Betriebsspannung automatisch.
|
| Ansicht der fertig bestückten Basisplatine des TW 128 mit zugehörigem Bestückungsplan |

|
| Ansicht der fertig bestückten Sensorplatine des TW 128 mit zugehörigem Bestückungsplan |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (5 Seiten)
als PDF (5 Seiten)
Sie erhalten folgende Artikel:
- TouchWheel TW 128 – auf Tuchfühlung bedient!
- 1 x Journalbericht
- 1 x Schaltplan
Hinterlassen Sie einen Kommentar:
 Videos
Videos