Mikrocontroller-Einstieg mit myAVR Teil 3/7
Aus ELVjournal
04/2006
0 Kommentare
Rein wie raus – die I/O-Ports
Nachdem
wir uns in der letzten Ausgabe sehr ausführlich der Funktion der
I/O-Ports des AVR-Controllers gewidmet hatten, ist uns die Aussage noch
gegenwärtig, dass es über das Steuerregister DDRx möglich ist,
festzulegen, welcher Pin als Eingang oder als Ausgang wirken soll. Über
das Register PORTx erfolgt entsprechend die Ausgabe, über PINx die
Eingabe von Signalen über die entsprechenden I/O-Lines. Was man zunächst
wissen muss, ist der Fakt, dass der Controller nach dem Einschalten
oder einem Reset immer den Inhalt der Register DDRB/C/D komplett auf
null setzt (0b00000000) – die „anhängenden“ I/OLines sind damit zunächst
stets als Eingang gesetzt. Erst das Laden des entsprechenden
Steuerregisters mit „1“, wie in unserem ersten Programmbeispiel, führt
zu einer Konfiguration als Ausgabe-Linie.
|
| Bild 26: Die Pegelverhältnisse am Controller-Eingang mit aktiviertem Pull-up-Widerstand |
Das Ein-/Ausgabeprogramm

|
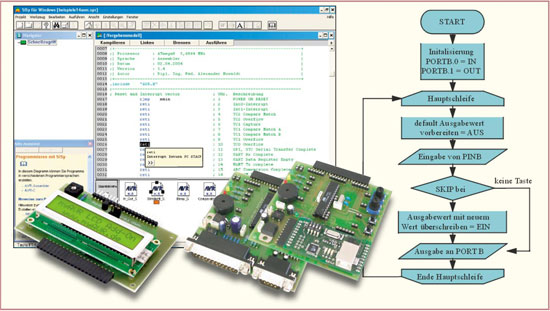
| Bild 27: Der Quellcode für unser I/O-Programm |
Der
löscht an der definierten Stelle des Registers das nach dem Reset auf
„0“ gesetzte Bit und setzt das Steuerregister für Port B 0 auf
„Eingang“, also, wie erwähnt, auf „0“. Der folgende „sbi“-Befehl spricht
direkt das Bit 0 im I/O-Register an und aktiviert damit die
Pull-up-Funktion an diesem Pin. Nun ist nur noch festzulegen, dass Port B
1 als Ausgang arbeiten soll, ergo ist das Steuerregister für Port B 1
auf „1“ zu setzen. Damit ist die Initialisierung erledigt und wir können
uns dem Hauptprogramm zuwenden. Nach dem Zurücksetzen des Watchdogs
wird zuerst eines der allgemeinen Register, hier wieder das bereits
bekannte r16, mit einem Ausgabewert für den Fall geladen, dass die Taste
nicht gedrückt ist, denn auch dieser Fall muss definiert werden, um dem
Rechner eindeutige Anweisungen für jeden Betriebsfall zu geben. Das
Laden von 0b00000001 bedeutet hier: Pin B 0 = 1 aktiviert den Pull-up-
Widerstand, Pin B 1 = 0 heißt: LED ausgeschaltet. Der nächste
„in“-Befehl sorgt dafür, dass der Wert, der am Eingang B 0 über das
Eingaberegister Pin B (siehe auch Abbildung 13 im Teil 2) durch den
Taster definiert wird („0“ oder „1“), wiederum in einem allgemeinen
Register, hier r17, zur Auswertung zwischengespeichert wird. Dies ist
der an sich unauffällige Knackpunkt des Eingabeprogramms, der
Input-Befehl. Jetzt folgen die Festlegungen, was der Controller mit dem
eben in r17 abgelegten Wert anfangen soll. Hier kommt mit „sbrs“ ein so
genannter eleganter Sprungbefehl (engl. skip) zur Anwendung. „sbrs“
heißt „Skip if Bit in Register Set“, zu Deutsch, der Controller soll den
dem Skip-Befehl folgenden Programmschritt auslassen, falls im folgend
angegebenen Register (hier r17) das ebenfalls angegebene Bit (hier Bit
„0“ ) gesetzt ist. Vereinfacht gesagt: Steht hier der zunächst aus Port B
ausgelesene Wert von Bit 0 auf einer logischen „1“, heißt dies, der
Taster ist nicht gedrückt und die LED darf nicht angesteuert werden.
Damit springt das Programm sofort in die Out-Zeile. Hier verändert sich
nichts, da in Register r16 ja immer noch die Ausgabedaten für einen
offenen Taster definiert sind und die LED nicht angesteuert wird (Bit B 1
steht immer noch auf „0“). Über den „rjmp“-Befehl kehrt das Programm
wieder zurück zum Beginn des Hauptprogramms. 
|
| Bild 28: Das Flussdiagramm für die Lösung unserer I/O-Aufgabe |

|
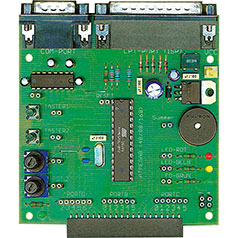
| Bild 29: Die Verdrahtung zur I/O-Aufgabe auf dem myAVR-Board |
Interrupt-Steuerung
Für
Programmier-Einsteiger hat das Wort „Interrupt-Steuerung“ einigen
Schrecken – die Profis sprechen da von Interrupt-Vektoren,
Interrupt-Service-Routinen, Interrupt- Quelle, -Maske usw. Der
myAVR-Lehrgang schafft es dennoch, dieses etwas sperrig erscheinende
Thema so zu vermitteln, dass man nach kurzer Zeit nicht nur mitreden,
sondern auch entsprechend programmieren kann. Das wollen wir hier
ausprobieren!Was ist Interrupt-Steuerung eigentlich?

|
| Bild 30: Der klassische Programmablauf beim Polling-Verfahren |
Interrupt-Quelle
Als
Interrupt-Quelle können äußere Sensoren (Ports), Schwellwerte des
A/DWandlers oder der integrierte Timer genauso auftreten wie spezielle
Software-Befehle. Der AVR-Controller auf unserem my- AVR-Board verfügt
über zahlreiche dieser Quellen. Tabelle 1 zeigt einen Auszug der
gängigsten Interrupt-Quellen dieses Controllers. Die Anzahl und Art der
Interrupt- Quellen ist bei jedem Controller eine andere und dessen
Aufgabenbereich angepasst.
|
| Die Interrupt-Quellen des ATmega8 |
Interrupt-Behandlungsroutine

|
| Bild 31: Der Grundaufbau der Interrupt-Service-Routine |
Interrupt-Vektor
Den
kennen wir schon, er steht in der Reset- und Interrupt-Tabelle jedes
Quellprogramms. Hinter diesem Begriff verbirgt sich eine hier
festgeschriebene Adresse, auf der ein Befehl zum Aufruf oder die Adresse
der zugehörigen Interrupt-Behandlungsroutine gespeichert ist. Bei
Eintreffen eines bestimmten Ereignisses springt das Programm also immer
mit dem jeweils einzutragenden Befehl „rjmp“ (+ selbst festzulegendem
Unterprogramm-Namen) zu dem diesem Ereignis zugeordneten Unterprogramm.
Nicht zur Nutzung vorgesehene Interrupt- Behandlungsroutinen sind mit
dem Befehl „reti“ zu versehen. Der sorgt dafür, dass ein hier dennoch
aufgetretener Interrupt ordnungsgemäß beendet wird. Da die Länge der
Interrupt-Vektor-Tabelle von der Anzahl der jeweils verfügbaren
Interrupt-Quellen abhängt, hat sie bei jedem Controller der ATmega-Reihe
auch eine andere Länge. Die Vektoren sind in der Tabelle in einer
festen Reihenfolge platziert, die nicht verändert werden darf.
Gleichfalls darf man keine Vektoren aus der Tabelle löschen, die vor
einem benutzten Vektor liegen.Interrupt-Kontroll-Logik
Sie
ist fester Bestandteil des Prozessor- Steuerwerks und verantwortlich
für das Erlauben oder Verbieten sowie Konfigurieren von Unterbrechungen,
dem tatsächlichen Unterbrechen des laufenden Programms und für das
Auslösen der korrekten Interrupt-Behandlungsroutine.Wichtige Adressen

|
| Bild
32: In diesem Ausschnitt aus der Reset- und Interrupt-Vektor-Tabelle
ist bereits der Sprungbefehl zur Interrupt-Service-Routine mit dem Namen
„EXT_INT0“ eingetragen. |
Interrupt-Befehle und -Register
Für
das gesamte Handling der Interrupt- Quellen stehen Steuerregister und
einige spezielle Befehle zur Verfügung. Die beiden wichtigen Befehle
„sei“ und „cli“ dienen der Aktivierung und Deaktivierung der Interrupts:
sei – signalisiert dem Steuerwerk, dass Interrupts erlaubt sind. Er
setzt das Interrupt- Flag „I“ (Bit 7) im Status-Register SREG (siehe
Registerübersicht zu myAVR). cli – signalisiert dem Steuerwerk, dass
Interrupts verboten sind. Er löscht das Interrupt-Flag „I“ (Bit 7) im
Status-Register SREG (siehe Registerübersicht zu myAVR). Jetzt wird auch
ein Blick in die eben genannte Registerübersicht interessant. Hier
finden wir für jede Interrupt-Quelle mindestens ein spezifisches
Steuerregister (Interrupt-Register und z. B. Register MCUCR), das die
Konfiguration der Interrupt- Quelle (prinzipiell ähnlich wie bei den
I/O-Registern) erlaubt. Interrupts, die nicht abschaltbar sind, nennt
man „nicht maskierbar“. Solch ein Interrupt ist z. B. die
Interrupt-Quelle „RESET“ – logisch, würde man diese versehentlich
abschalten, gelänge kein definierter Reset des Controllers mehr!
Hingegen sind die (externen) Interrupts, die man per Programm ein- und
ausschalten kann, mit dem Begriff „maskierbar“ gekennzeichnet (bei
unserem ATmega8 sind dies z. B. die allgemeinen externen Interrupts INT0
und INT1). Dazu stehen entsprechende Steuerregister als „Maske“ zur
Verfügung, in denen man über die entsprechenden Bits die Interrupts ein-
(„1“) und ausschalten („0“) kann. Man teilt also dem Steuerwerk mit,
welches Ereignis als Interrupt akzeptiert werden soll. Für unsere eben
erwähnten INT0 und INT1 heißt das zuständige Register „GICR“. Je
nachdem, wie dessen Bits 6 bzw. 7 gesetzt werden, sind die Interrupts
erlaubt oder gesperrt.
|
| Bild 33: Flussdiagramm zur Interrupt-Steuerung |
Schließlich
kann auch die Art der Interrupt-Auslösung festgelegt werden. Bei jedem
digitalen Signal gibt es die unterschiedlichen Zustände High-Pegel,
Low-Pegel, fallende und steigende Signalflanke, die die externen
Interrupts auslösen können. Diese Konfiguration erfolgt über die Bits 0
bis 3 des Registers MCUCR (siehe Registertabelle). Bei Setzen des Bits 0
erfolgt eine fortlaufende Interrupt- Auslösung, solange Low-Pegel
anliegt, bei Bit 1 löst jede Pegeländerung einen Interrupt aus, bei Bit 2
die fallende, bei Bit 3 die steigende Flanke. Nach so viel Theorie
wollen wir das Ganze zunächst wieder an einem ganz einfachen Beispiel
praktizieren – wir schließen einen Taster an den Interrupt-Port INT0
(Port D 2) an und nutzen diesen als Ereignis-Quelle. Wird der Taster
gedrückt, soll wieder die rote LED an Port B 0 aufleuchten. Die
Auswertung wollen wir über die fallende Signalflanke (der für eine
Auswertung interessante Moment also, wo der Taster tatsächlich gedrückt
wird und den Eingang auf „low“ schaltet) vornehmen. Dieses Mal machen
wir uns die zu planenden Programmschritte zuerst anhand des
Flussdiagramms klar (Abbildung 33):
- initialisieren
- Port D 2 als Eingang festlegen und Pullup aktivieren
- Port B 0 als Ausgang festlegen
- Maskierung für INT0 aktivieren, INT0 für fallende Flanke konfigurieren, Interrupt erlauben
- bei
Ereignis ISR starten, andere Interrupts sperren, Port B 0 auf 1 (LED
an) schalten, Interrupts freigeben, zurück zum Hauptprogramm
Im
Quellcode-Editor wird wieder das Grundgerüst geladen und vorbereitet,
dieses Mal aktivieren wir aber den Vektor für den INT0-Interrupt, hier
mit „EXT_0“.

|
| Bild 34: Die Verdrahtung zur Interrupt-Steuerung auf dem myAVR-Board |

|
| Bild 35: Unser Beispielprogramm für die Nutzung von INT0 als Interrupt-Quelle |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (6 Seiten)
als PDF (6 Seiten)
Sie erhalten folgende Artikel:
- Mikrocontroller-Einstieg mit myAVR Teil 3/7
| weitere Fachbeiträge | Foren | |
Hinterlassen Sie einen Kommentar: