Hausschaltsystem HS485 – Hutschienen-Multi-I/O-Modul IO127 Teil 1/2
Aus ELVjournal
05/2006
0 Kommentare
Technische Daten
| Spannungsversorgung | 24 VDC |
| Ruhestromaufnahme | 14 mA |
| Max. Stromaufnahme | 150 mA |
| Schaltleistung | 230 V, 16 A |
| Rasterbreite | 72 mm (4 TE) |
Mit
dem Multi-I/O-Modul steht eine sehr universell einsetzbare Komponente
für das HS485-Hausschaltsystem zur Verfügung. Es verfügt über 12
digitale Eingänge und 7 Relais- Schaltausgänge, die für eine
Gesamtbelastung von bis zu 16 A ausgelegt sind. Die Konfiguration des
vielseitigen Moduls erfolgt über die HS485-Konfigurationssoftware und
das PC-Interface des Systems.Tausendfüßler am HS485-Bus
Bei
einer komplexen Haussteuerung, wie sie das HS485-System inzwischen
darstellt, können an manchen Stellen gar nicht genug Schnittstellen für
Bedienung und Ausgabe zur Verfügung stehen. Mit dem neuen Modul, das
sich selbstverständlich nahtlos in die bisherige Riege der
HS485-Bausteine einreiht, steht ein multifunktionales Modul zur
Verfügung, das genau diesem Wunsch entgegenkommt. Es ist für den Aufbau
auf DIN-Hutschienen geeignet und besitzt 12 digitale Eingänge und 7
Relaisausgänge. Ausgangsseitig können insgesamt bis zu 16 A geschaltet
werden, und dank der gemeinsamen Spannungsquelle auf der Aus gangsseite
wird der installationsseitige Verdrahtungsaufwand minimiert. Alle Aus
gänge sind mit Timer-Funktionen ausgerüstet und vollständig kompatibel
zu den bisherigen Systemkomponenten. Die Eingänge sind galvanisch von
den Ausgängen getrennt. Die Konfigurationssoftware in Verbindung mit dem
HS485-PCI-Modul ermöglicht eine einfache Konfiguration des Moduls.
Ergebnis ist eine kompakte Steuer- und Schaltzentrale, die dank der
Programmierbarkeit die unterschiedlichsten Aufgaben lösen kann.Bedienung und Funktion
Die
Konfiguration des HS485-IO127- Moduls erfolgt vollständig über den PC.
Dazu wird das HS485-PC-Interface mit der Konfigurationssoftware sowie
die Konfigurationsdatei für das HS485-IO127- Modul benötigt. Diese steht
im Internet auf der ELV-Homepage zum Download zur Verfügung. Nach dem
Start der Konfigurationssoftware wird die Verbindung mit den Modulen
hergestellt. Die Konfiguration der Module gestaltet sich sehr einfach,
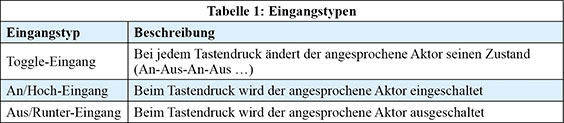
da es hier nur einen Ein- und einen Ausgangstyp gibt.Für
jeden Eingang ist der Eingangstyp und der Sensortyp einstellbar. Die
möglichen Eingangstypen und ihre Reaktion auf die Änderung des
Eingangszustands sind in Tabelle 1 beschrieben. Tabelle 2 beschreibt die
möglichen Sensortypen und gibt an, bei welchen Ereignissen Nachrichten
gesendet werden. Je nach Kombination von Eingangs- und Sensortyp ergeben
sich unterschiedliche Events (Ereignisse) in den gesendeten
Key-Event-Nachrichten. Die Events, die beim Sensortyp „Taster- Eingang“
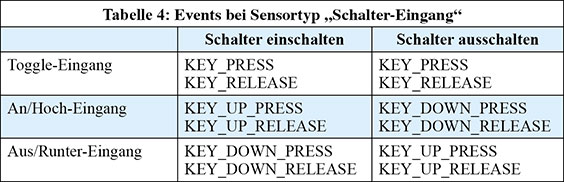
gesendet werden, zeigt Tabelle 3. Ist
der Sensortyp „Schalter- Eingang“ gewählt, so verhalten sich die Events
wie in Tabelle 4 beschrieben. Wie man erkennen kann, werden bei einem
Schalter am Eingang des HS485 IO127 immer zwei Key-Event- Nachrichten
gesendet. Die verschiedenen Nachrichten wurden bereits im „ELVjournal“
2/06 be schrieben, deswegen gehen wir hier nicht näher darauf ein. Ausgänge
Für
die Ausgänge können Schaltzeiten im Bereich von 0 bis 65.000 Sekunden
eingestellt werden. Dabei gibt es zwei unterschiedliche Timer-Modes, die
äquivalent zu denen des HS485 S und HS485 IO4UP sind. Hier stehen
„Treppenhaus“ und „automatisch ausschalten“ zur Auswahl. Will man keinen
Timerbetrieb, so wird „Kein Timer“ gewählt. „Treppenhaus“ bedeutet,
dass bei jedem Schaltbefehl die Zeit neu gestartet wird. „Automatisch
ausschalten“ bedeutet, dass nach Ablauf der Zeit der Aktor abschaltet.
Er kann aber auch durch einen erneuten Schaltbefehl ausgeschaltet
werden. Dies ist z. B. im Keller oder Abstellraum sinnvoll. Jeder
Eingang an jedem beliebigen Modul besitzt ein Bit, das bei jedem
Tastendruck seinen Zustand ändert. Dieses Bit wird mit dem Key-Event an
den programmierten Ausgang übertragen. Das Toggle-Bit sollte für jeden
Ausgang je nach Anwendungsfall individuell gesetzt werden. Ist für den
Ausgang das Toggle-Bit gewählt, so nimmt der Ausgang den Zustand des
übertragenen Bits an. Dies ist z. B. dann sinnvoll, wenn man mit einem
Taster mehrere Aktoren gleichzeitig ein- oder ausschalten möchte. Wird
das Toggle-Bit ausgeschaltet, so wechselt der Ausgang nur seinen Zustand
(z. B. von An nach Aus). Dies ist z. B. in einem Treppenhaus sinnvoll,
bei dem die verschiedenen Taster an unterschiedliche Module
angeschlossen sind.Zuordnung von Ein- und Ausgängen
Zur
Zuordnung von Eingängen zu den Ausgängen an diesem oder einem
beliebigen anderen Ausgang im Bus-System stehen 64 Ziele zur Verfügung.
Soll ein Eingang dieses Moduls programmiert werden, so ist unter
„Ziel-x-Eingang“ der gewünschte Eingang auszuwählen. Die Adresse des
Zielaktors wird unter „Ziel-x- Adresse“ ausgewählt und der zugehörige
Aktor mit „Ziel-x-Aktor“ selektiert.Schaltung

|
| Bild 1: Der Schaltplan des Step-down-Wandlers |

|
| Bild 2: Schaltplan der Mikrocontroller-Steuerung mit Eingangs- und Leistungsteil |
Die
Schaltung des HS485 IO127 setzt sich aus zwei Teilen zusammen. Der
Stepdown- Wandler (Abbildung 1) erzeugt die nötige 5-V-Betriebsspannung
und der Mikrocontroller samt Peripherie (Abbildung 2) ermöglicht die
Bus-Kommunikation und die Abfrage/Steuerung der Eingänge und Ausgänge
des Moduls. Die 5-V-Spannungsversorgung wird über einen
Step-down-Wandler aus der 24-V-Betriebsspannung erzeugt. Er arbeitet in
einem weiten Spannungsbereich von 10 bis 30 V und liefert einen Strom
von bis zu 100 mA. Die Diode D 9 dient als Schutzdiode und sichert die
Schaltung gegen Verpolung der Versorgungsspannung. Diese wird mit dem
Elko C 15 gepuffert und versorgt den Schaltregler. Als Regler kommt hier
der MC34063A zum Einsatz. 
|
| Bild 3: Das Blockschaltbild des MC34063A |
Die
Ausgangsrelais werden über einen Transistor vom Typ BC848C vom
Controller aus angesteuert. Der 1-kΩ-Widerstand am Basis-Eingang
begrenzt den Basis strom. Die Dioden, die den Relais parallel geschaltet
sind, dienen hierbei als Freilaufdioden, um die von den Relaisspulen
aufgenommene Energie beim Abschalten abzuführen. Dies ist notwendig, um
Schäden an der Elektronik zu verhindern, da im Abschaltmoment hohe
Spannungen auftreten können. Alle Relais werden ausgangsseitig über die
Klemme KL 9 mit Phase verbunden. Die geschaltete Spannung ist über
jeweils zwei Klemmen abgreifbar. Der maximale Gesamt-Strom über die
Eingangsklemmen darf 16 A nicht überschreiten, da sonst eine Überlastung
der Leiterbahnen auf der Platine eintritt. Die Verbindung mit dem
RS485-Bus wird über die Klemme KL 1 hergestellt. Dabei muss das Signal
noch über das IC 2 von RS485- in TTL-Pegel umgewandelt werden. Dieses IC
vom Typ LT1785CS8 hat den Vorteil, selbst Fehlerspannungen an der A-
und B-Ader von bis zu 60 V ohne Schaden kompensieren zu können. Eine
versehentliche Verbindung der 24-V-Betriebsspannung mit der Busleitung
führt daher zu keiner Zerstörung des TTL-RS485- Wandlers. Da die
Schaltung auf zwei Leiterplatten aufgebaut ist, müssen die Signale über
Stiftleisten geführt werden. Dazu dienen die Leiterplattenverbinder ST 1
bis ST 3. RS485-Bus
An
dieser Stelle einige Erläuterungen zum RS485-Bus: Die
RS485-Schnittstelle ist für die störungsfreie serielle Datenübertragung
über große Entfernungen entwickelt worden und wird wegen dieser Vorteile
zunehmend im industriellen Bereich eingesetzt. RS485 ist ein
bidirektionales Bus-System und ist für bis zu 32 Teilnehmer konzipiert.
Aufgrund der bei uns eingesetzten Bus-Treiber können allerdings auch bis
zu 127 Teilnehmer an einen Busstrang angeschlossen werden. RS485 kann
sowohl als 2-Draht- wie auch als 4-Draht-System aufgebaut werden. Je
nach Technik ist das System halb- oder vollduplexfähig. Aber nur das
2-Draht-System ist multimasterfähig, das bedeutet, jeder Teilnehmer kann
mit jedem Teilnehmer kommunizieren. Bei einem nicht multimasterfähigen
System gibt es immer nur einen einzigen Master, der mit den Slaves
kommuniziert. Aus diesem Grund wird beim HS485-Haussteuersystem der
2-Draht-Bus eingesetzt. Laut Norm ist eine Buslänge von bis zu 500 m
vorgesehen. Durch moderne Kabel und Leitungen ist die mögliche
Kabellänge mittlerweile auf bis zu 1,2 km gestiegen. Physikalisch werden
die Daten im Differenzspannungsverfahren übertragen. Dabei gibt es eine
invertierte und eine nicht invertierte Leitung. Es gibt also keinen
Massebezug des Datensignals. Die invertierte Leitung wird in der Regel
als „A“- Leitung bezeichnet, die nicht invertierte als „B“. Der
Empfänger wertet immer die Differenz zwischen den beiden Leitungen aus,
so dass Störungen, die auf beiden Leitungen liegen, sich nicht auf das
Datensignal auswirken. Durch diese Eigenschaft führt die Verlegung von
verdrillten Adern zu einer erhöhten Reichweite, da Störungen immer auf
beiden Adern gleichzeitig auftreten. Die Empfängerbausteine erkennen
eine Differenzspannung von ±200 mV noch als gültiges Signal an. Daraus
ergeben sich die folgenden Zustände:Daraus
folgt, das eine Vertauschung der Busleitungen eine fehlerhafte
Signalübertragung zur Folge hat. Eine Vertauschung sollte man daher
unbedingt vermeiden. Der Bus ist immer mit einem Busabschluss
abzuschließen, um in Sendepausen, in denen kein Teilnehmer Daten sendet,
ein definiertes Signal auf dem Bus zu erhalten. Das Protokoll ist nicht
fest vorgegeben, muss aber verhindern, dass zu einem bestimmten
Zeitpunkt mehrere Sender gleichzeitig Daten senden. Alle anderen
Teilnehmer am Bus müssen sich in einem hochohmigen Zustand befinden. Sie
sind im Allgemeinen auf Datenempfang geschaltet. Im zweiten Teil des
Artikels werden wir uns mit dem Aufbau der Schaltung und der
Inbetriebnahme des Moduls beschäftigen. 
|
| Schaltungsbeispiel für die Einbindung des HS485 IO127 in das HS485-System |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (4 Seiten)
als PDF (4 Seiten)
Sie erhalten folgende Artikel:
- Hausschaltsystem HS485 – Hutschienen-Multi-I/O-Modul IO127 Teil 1/2
- 1 x Journalbericht
- 1 x Schaltplan
| weitere Fachbeiträge | Foren | |
Hinterlassen Sie einen Kommentar:






 Videos
Videos










