Mikrocontroller-Einstieg mit myAVR Teil 5/7
Aus ELVjournal
06/2006
0 Kommentare
UART – seriell und asynchron
Der
Austausch von Daten mit anderen Systemen ist eine wichtige
Voraussetzung für die Arbeit mit Mikrocontrollern. Der
Kommunikations-„Partner“ muss nicht immer ein PC sein, auch Tastaturen,
Displays und externe Speicher müssen vom Prozessor abgefragt bzw. mit
Daten versorgt werden. Dabei hat sich in Mikrocontrollern die serielle
Schnittstelle bis heute bewährt. Sie ist einfach aufgebaut, entsprechend
einfach handhabbar und in den Controllern implementiert. Beim
AVR-Controller finden wir neben den seriellen Interfaces I2C und SPI die
serielle Schnittstelle in Form eines integrierten UART-Bausteins
(Universal Asynchron Receiver Transmitter). Dieser spezielle
Schnittstellenbaustein unterstützt die serielle Datenübertragung nach
der weitverbreiteten RS232-Norm und stellt damit eine einfache
Möglichkeit dar, Daten zu versenden und zu empfangen.
Dies erfolgt über die Zweidrahtschnittstelle des AVR. Diese allerdings
arbeitet mit den in Mikrocontrollersystemen üblichen TTL-Pegeln. Das ist
in Ordnung, solange über kurze Strecken etwa mit einem angeschlossenen
Speicherbaustein direkt kommuniziert werden soll.
|
| Bild
42: Der MAX 232 sorgt für die normgerechte Erzeugung der Pegel für die
RS232-Schnittstelle aus der 5-V-Betriebsspannung. Darüber ist der
RS232-Port zu sehen. |
Damit
und mit dem 9-poligen Sub-D-Steckverbinder auf dem Board sind die
hardwaremäßigen Voraussetzungen erfüllt, um mit einer
RS232-Standard-Schnittstelle, wie sie die serielle PC-Schnittstelle
darstellt, kommunizieren zu können. Bleibt noch die eigentliche
Verbindung. Abbildung 43 zeigt die vollständige Verbindung zwischen zwei
RS232-Schnittstellen. Zusätzlich zu den Datenleitungen RXD (Empfangen)
und TXD (Senden) finden wir hier noch einige Steuerleitungen, die
jeweils die Bereitschaft von Sender und Empfänger zur Datenübertragung
signalisieren. Für eine einfache Datenübertragung nutzt man allerdings
oft die in Abbildung 44 dargestellte 3-Draht-Nullmodem-Verbindung. Ein
so beschaltetes Nullmodem-Kabel befindet sich im Lieferumfang des
myAVR-Sets, womit alle hardwareseitigen Voraussetzungen für den
Datenaustausch zwischen PC und AVR erfüllt sind. 
|
| Bild 43: Die vollständige RS232-Verbindung mit Steuerleitungen. |

|
| Bild 44: Die vereinfachte RS232-Verbindung als Nullmodem-Verbindung. |
Diese
geringe Leitungsanzahl (je Richtung eine plus Masse) wird durch das
angewendete serielle, asynchrone Datenübertragungsverfahren mit einer
sehr einfachen Datenstruktur ermöglicht. Asynchron heißt, dass mit den
Daten kein Taktsignal übertragen wird und es keine Rückfrage über den
ordnungsgemäßen Empfang der Daten gibt. Somit verliert man keine Zeit
mit der Kontrolle der Datenübertragung. Allerdings müssen dazu Sender
und Empfänger mit exakt der gleichen Übertragungsrate (Baudrate)
arbeiten bzw. darauf eingestellt sein. Und beide Stellen müssen sich
gegenseitig signalisieren, wenn die eigentliche Datenübertragung beginnt
(Start-Bit) und endet (Stopp-Bit). Entsprechend sind die Datenbits
eines Datenwortes jeweils von je einem Start- und Stopp-Bit eingerahmt.
So erreicht man eine relativ schnelle und sehr einfach aufzubauende
Datenverbindung. UART inside
Verschaffen
wir uns zum Verständnis der Programmierung des AVR-UARTs zunächst mit
Abbildung 45 einen Überblick über seinen Aufbau. Auch hier erfolgt die
Programmierung über Register, die der Steuerung, der Festlegung der
Baudrate und der Verwaltung der eigentlichen Daten dienen. Die
Übertragungsrate wird direkt aus dem quarzstabilen Systemtakt generiert,
die Genauigkeit ist für diese Art der Datenverbindung völlig
ausreichend.
|
| Bild
45: Der Aufbau des UART und seine Registerbelegung. Die
Registerbezeichnungen können je nach Controllertyp variieren, die
Funktionen sind jedoch kompatibel. |

|
| Bild 46: Der UART besitzt drei Interrupt-Quellen, die alternativ zum Pollingverfahren einsetzbar sind. |
UART initialisieren
Wollen wir uns nun mit der Programmierung des UARTs befassen, um schließlich Daten an einen angeschlossenen PC zu senden.Baudrate einstellen
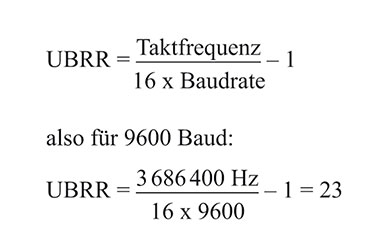
Wie
gesagt, die Baudrate wird direkt aus dem Systemtakt abgeleitet. Die
RS232-Konventionen sehen eine Reihe definierter Baudraten, z. B. 1200,
2400, 9600, 57 600 oder 115 200 Baud vor. Entsprechend ist ein Faktor in
das Register UBRR zu laden. Wollen wir z. B. mit der gängigen Baudrate
9600 Baud übertragen, errechnet sich dieser Faktor wie folgt:Im späteren Programm kann man den Faktor entweder als Formel oder gleich das Ergebnis eintragen. Empfänger/Sender initialisieren
Nach
dem Einschalten des AVR sind die Empfänger- und Senderbausteine
ausgeschaltet, einmal um Strom zu sparen und zum anderen um ungewollte
Übertragungen und Störeffekte zu unterbinden.
Daher muss je nach Aufgabe der Sender und/oder Empfänger des UART
aktiviert bzw. deaktiviert werden.
Dies erfolgt über das Kontroll-Register UCR/UCSRB (siehe Abbildung 45)
und dort über die Bits 3 (Sender (TX) ein-/ausschalten) und 4 (Empfänger
(RX) ein-/ausschalten).Daten empfangen
Nachdem
nun die Initialisierung abgeschlossen ist, kann der UART-Baustein Daten
empfangen. Die Empfangssteuerung erfolgt über die beiden Register
USR/UCSRA und UDR (siehe Abbildung 45). Dabei wird über das
Statusregister USR/UCSRA über das Bit 7 (RXC, Receive complete) durch
ständige Abfrage (Polling) überwacht, ob das Stopp-Bit gesendet wurde.
Erst dann werden die empfangenen Daten im Datenregister UDR abgelegt und
liegen hier zur Auswertung bereit.
|
| Bild 47: Das Unterprogramm zum Warten auf den Empfang eines Bytes. |
Daten senden

|
| Bild 48: Das Unterprogramm der Senderoutine im Polling-Modus. |
Das Programm

|
| Bild 49: Der Quellcode für die serielle Datenübertragung des Wortes TEST! an den PC. |

|
| Bild 50: Unser Text ist im PC angekommen! Er wird über das Terminalprogramm des Controlcenters ausgegeben. |
Analoge Signalverarbeitung
Erinnern
wir uns noch an den Beginn unserer Serie, als wir Aufbau und Pin-Out
des AVR-Controllers besprochen haben. Hier fallen uns auch diverse
analoge Ports auf, darunter mehrere A/D-Wandler-Eingänge und ein
Komparator. Die Nutzung des Letzteren wollen wir in unserem kurzen
Beispiel genauer erarbeiten. Die ausführliche Nutzung der A/D-Wandler,
die einen analogen Spannungswert in eine digitale Größe umwandeln,
überlassen wir dem ausführlichen myAVR-Lehrgang.Der Komparator des ATmega

|
| Bild 51: Der prinzipielle Schaltungsaufbau des Komparators und das zugehörige Steuerregister ACSR. |
Das Steuerregister
Das
in Abbildung 51 bereits abgebildete Steuerregister des Komparators
bietet zahlreiche Optionen zur Steuerung des Komparators. So kann er
durch Setzen des Bits 7 wie die UART-Sender/-Empfänger ein- und
ausgeschaltet werden. Durch Bit 6 ist die Umschaltung zwischen einer
externen oder der internen Referenzspannung (fest: 1,22 V) möglich. Die
Auswertung von Bit 5 ermöglicht es, den aktuellen Ausgangswert des
Komparators auszulesen.
Und da wir den Komparator auch in der Interrupt-Vektortabelle als
Interrupt-Quelle finden, zeigt Bit 4 des Steuerregisters an, ob ein
Komparator-Interrupt-Ereignis vorliegt oder nicht. So kann der
Komparator bei entsprechender ISR einen Interrupt auslösen – sofern man
über Bit 2 des Steuerregisters diese Betriebsart freigibt und über Bit 1
und 0 das Interrupt-Ereignis definiert (Interrupt bei jedem Wechsel des
Komparatorausgangs, bei fallender oder bei steigender Flanke).
In unserem folgenden Programmierbeispiel wollen wir den Komparator dazu
nutzen, zwei analoge Spannungen an AIN 0 und AIN 1 zu überwachen und,
wenn die Spannung an AIN 1 die an AIN 0 übersteigt, eine LED zu
schalten. Dazu lassen wir die Interrupt-Möglichkeit wieder außen vor und
überwachen den Zustand des Bits 5 im Komparatorregister ACSR im
Polling-Betrieb, ähnlich unserem Vorgehen bei der seriellen
Datenübertragung. Als Spannungsquellen nutzen wir praktischerweise die
beiden Potentiometer des myAVR-Boards, die den Komparatoreingängen
Spannungen zwischen 0 und +5 V liefern können.Das Programm

|
| Bild 52: Der Quellcode zum Komparatorprogramm. |

|
| Bild 53: Die Verdrahtung des myAVR-Boards. |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (5 Seiten)
als PDF (5 Seiten)
Sie erhalten folgende Artikel:
- Mikrocontroller-Einstieg mit myAVR Teil 5/7
| weitere Fachbeiträge | Foren | |
Hinterlassen Sie einen Kommentar: