Serielles Funk-Interface FHT 8I – für die Ansteuerung von bis zu 4 Funk-Heizkörper-Ventilantrieben FHT 8V
Aus ELVjournal
04/2007
0 Kommentare
Technische Daten
| Versorgungsspannung | 3 V |
| Stromaufnahme | 30 μA (a)*, 90 μA (b)*, 400 μA (c)* |
| Abmessungen | 78,4 x 45 x 8 mm |
| Anzahl der unabhängig steuerbaren Antriebe | 4 |
| Sendefrequenz | 868,35 MHz |
| * Typische Werte unter folgenden beispielhaften Bedingungen: | |
| (a) 1 Antrieb, LED deaktiviert, Energiesparmodus, 4 Datenübertragungen pro Stunde; | |
| (b) 4 Antriebe, LED aktiv, Energiesparmodus, 8 Datenübertragungen pro Stunde; | |
| (c) 4 Antriebe, LED aktiv, kein Energiesparmodus, 8 Datenübertragungen pro Stunde | |
Das
Interface FHT 8I ermöglicht die einfache Ansteuerung von
Ventilantrieben des Typs FHT 8V per Funk. Die gewünschte Ventilposition
wird über ein einfaches serielles Datenprotokoll z. B. von einem
Mikrocontroller in das Interface geschrieben. Dieses übernimmt dann die
weitere Codierung und die Zeitverwaltung für die Funkübertragung. Im
Zusammenspiel mit dem Controller, der die Ventilposition errechnet,
ermöglicht das Interface so den relativ einfachen Aufbau einer
Temperaturregelung.Einfach und effizient regeln
In
den meisten Haushalten erfolgt die Raumheizung über eine Warmwasser-
Zentralheizung. Zur Wärmeabgabe sind in den einzelnen Räumen ein oder
mehrere Radiatoren installiert. Die Durchflussmenge und damit die
Wärmeabgabe wird über ein direkt am Heizkörper montiertes Ventil
reguliert. Im einfachsten Fall betätigt ein rein mechanisch arbeitender,
auf dem Prinzip der Wärmeausdehnung beruhender Thermostatkopf das
Ventil. Für eine zeitabhängige, den Nutzungsgewohnheiten angepasste
Temperaturregelung ist jedoch eine elektrische bzw. elektronische
Verstellung des Ventils erforderlich. Hier sind von verschiedenen
Herstellern unterschiedliche Produkte erhältlich. Besonders komfortabel
sind batteriebetriebene Funksysteme wie der Raumregler ELV FHT 80B. Hier
gestaltet sich die Installation besonders einfach, da weder ein
Netzanschluss erforderlich ist, noch ein Kabel zum Heizkörper verlegt
werden muss. Zudem bietet dieser Regler noch weitere Möglichkeiten wie
z. B. die Einbindung in ein zentrales Haussteuersystem oder die
automatische Absenkung der Raumtemperatur beim Lüften mittels eines
Fenster-Magnetkontaktes. Wer allerdings nicht auf fertige Lösungen
zurückgreifen möchte, sondern sich seine eigene Regelung z. B. PC- oder
Mikrocontroller- basierend aufbauen möchte, der steht alsbald vor der
Frage, wie sich das Ventil am besten betätigen lässt. Die Kräfte, die
auf den Ventilstift aufgebracht werden müssen, um das Ventil zu
schließen, sind nicht unerheblich, so dass Eigenbaulösungen mit einem
Servo oder ähnlichem kaum in Frage kommen. Somit bietet es sich hier an,
auf einen fertigen Aktor zurückzugreifen. Die einfachste Ausführung
eines solchen Aktors ist ein thermischer Stellantrieb. In diesem wird
ein Ausdehnungskörper elektrisch beheizt und betätigt dann das Ventil.
Neben 230-Volt-Varianten sind auch solche mit 24 Volt Nennspannung
erhältlich, so dass hier eine relativ gefahrlose Verwendung in
Eigenbauten möglich ist. Ein Vorteil von thermischen Stellantrieben ist,
dass diese weitestgehend geräuschlos arbeiten. Ein wesentlicher
Nachteil ist der recht hohe Energiebedarf von ca. 3 Watt, der ein
Netzteil und eine Kabelverbindung zwischen Stellantrieb und Regler
unumgänglich macht. Zudem reagieren diese Antriebe recht träge und
lassen sich nicht genau positionieren. Meist werden sie deshalb nur über
einen Zweipunktregler ganz auf bzw. ganz zu „gefahren“.Der elektronische Ventilantrieb FHT 8V
Nahezu
ideal sind hier elektronische Ventilantriebe, bei denen der Ventilstift
über einen Motorantrieb mit starker Getriebe- Untersetzung betätigt
wird. Der im ELV-Funk-Heizkörperthermostat-System verwendete
Ventilantrieb FHT 8V benötigt keine Kabelverbindung, er ist
batteriebetrieben, die Ansteuerung erfolgt per Funk. Dabei werden dem
Antrieb die Positionierbefehle in kurzen, digitalen Protokollen über
eine 868-MHz-Funkstrecke mitgeteilt. Auf einem kleinen Display sind
ständig die wichtigsten Informationen wie Ventilposition, Funkempfang
und Batteriestatus abzulesen. Mittels eines integrierten Signalgebers
kann der Antrieb außerdem eine zu geringe Batteriespannung akustisch
anzeigen. Die Versorgung des Antriebs erfolgt über 2 Mignon Batterien,
die abhängig von Verstellweg und Verstellhäufigkeit, bis zu zwei Jahre
halten. Eine so lange Batterielebensdauer kann nur erreicht werden, wenn
der Empfänger nicht permanent, sondern nur ca. alle 2 Minuten für
wenige 100 Millisekunden eingeschaltet ist. Dementsprechend genau muss
das Senderaster des Reglers sein. Zudem ist auch das
Übertragungsprotokoll recht aufwändig. Dies ist unter anderem notwendig,
um Beeinflussungen von benachbarten Systemen zu vermeiden und um
Empfangsfehler erkennen zu können. Für ein Eigenbauprojekt bietet sich
somit vor allem aufgrund des nötigen Programmieraufwands ein direktes
Ansprechen des Antriebs über die Funkschnittstelle nicht an. Für diese
Anwendung bietet das serielle Funkinterface FHT 8I nun eine geeignete
Lösung. Es übernimmt die Codierung des Funkprotokolls und das zyklische
Senden an bis zu 4 unabhängig ansteuerbare Ventilantriebe. Die
entsprechenden Steuerdaten werden über eine besonders einfach gehaltene
serielle Schnittstelle zum Interface geschickt. Dies lässt sich
problemlos mit jedem gängigen Mikrocontroller realisieren, der dann auch
praktischerweise gleichzeitig die Erfassung der Raumtemperatur, den
Vergleich mit der eingestellten Solltemperatur und die Generierung der
entsprechenden Steuerbefehle übernehmen kann. Für weitergehende
Anwendungen, etwa zeitabhängiges Ansteuern des Ventilantriebs, bietet
sich dann auch eine PC-Steuerung an.Bedienung und Anzeige

|
| Tabelle 1: Fehlercodes |
Befehlssatz

|
| Tabelle 2: Befehlssatz des FHT 8I |
Mittels
der Befehle 0x21 und 0x22 kann der akustische Low-Bat-Alarm der
Ventilantriebe freigegeben bzw. gesperrt werden. Dies ist vor allem dann
nützlich, wenn man verhindern möchte, dass der Antrieb im Schlafzimmer
um 3 Uhr nachts darauf aufmerksam macht, dass seine Batterien bald
getauscht werden müssen... Das bereits erwähnte Ein- bzw. Ausschalten
der Kontroll-LED wird mittels Befehl 0x23 und 0x24 vorgenommen. Diese
Festlegung wird ausfallsicher im EEPROM gespeichert und somit auch nach
einem Spannungsausfall wiederhergestellt. Zur Reduzierung der
Stromaufnahme dient auch das Ausschalten des Hauptoszillators während
der Ruhephasen. Das Wiedereinschalten dieses Oszillators erfordert
allerdings ca. 50 ms Wartezeit. Diese macht sich insbesondere beim Start
einer seriellen Übertragung bemerkbar. Zum Einlesen des ersten Bits ist
das FHT 8I mehr als 50 ms „Busy“ während die Übertragung der restlichen
Bits wesentlich schneller vonstatten geht. Sollte die Verzögerung nicht
akzeptabel sein und die Stromaufnahme des Moduls eine untergeordnete
Rolle spielen, so kann man das Abschalten des Hauptoszillators mit dem
Befehl 0x26 unterbinden. Befehl 0x25 macht diese Einstellung wieder
rückgängig. Nach einem Neustart ist automatisch wieder der
Energiesparmodus aktiv. Im FHT 8I selbst erfolgt keine Überwachung der
Versorgungsspannung. Somit verwendet es auch nicht das Batterie-Symbol
auf dem Display. Dieses kann deshalb durch das übergeordnete System
genutzt werden. Mit dem Befehl 0x27 wird das Symbol eingeschaltet, mit
dem Befehl 0x28 wieder ausgeschaltet. Der Befehl 0x33 dient lediglich zu
Testzwecken. Wird dieser Befehl mit den Daten 0x55 gesendet, so
akzeptiert das Modul diese Übertragung als korrekt und zeigt dies auch
mit der grünen LED an, es werden aber keine weiteren Aktionen ausgelöst. Serieller Übertragungsrahmen
")
|
| Bild 1: Ein Übertragungsbeispiel für eine Befehlssequenz (siehe Text) |
Schaltung

|
| Bild 2: Das Schaltbild des Funk-Interfaces |
Nachbau

|
| Bild 3: So wird das Display zur Bestückung vormontiert |
Einbau

|
| Bild 4: Maßskizze der Interface-Baugruppe mit der genauen Lage der Befestigungsbohrungen |

|
| Bild5: Die Lage der Gehäuseausschnitte im Gehäusedeckel |
Inbetriebnahme
Nachdem
die Versorgungsspannung eingeschaltet ist, führt das FHT 8I zunächst
einen Segmenttest am Display durch. Danach wird hier die Firmwareversion
angezeigt, gefolgt von der Anzahl der Antriebe „nA“.
Default-Einstellung ist hier 1, womit die Anzeige dann 1A darstellt.
Arbeitet das Modul soweit fehlerfrei, kann die Schnittstelle z. B. mit
dem erwähnten Befehl 0x33 getestet werden.Reglersoftware
Die
Ventilposition (Stellgröße) wird grundsätzlich aus dem Vergleich der
gewünschten Temperatur (Sollwert) mit der gemessenen Temperatur
(Istwert) ermittelt. Es gibt verschiedene Verfahren, mit denen sich aus
der Differenz von Soll- und Istwert eine Stellgröße errechnen lässt.
Neben dem auch aus der analogen Regelungstechnik bekannten PID-Regler
seien hier als Beispiel die sogenannten Fuzzy-Algorithmen genannt.
Details hierüber würden den Rahmen dieses Artikels sprengen.
Einschlägige Quellen im Internet und Fachbücher bieten eine umfassende
Hilfe. Grundsätzlich sollte jedoch bedacht werden, dass es sich bei
einem über Radiatoren beheizten Raum um ein sehr träges System handelt.
Es ist somit wenig sinnvoll, die Raumtemperatur im Sekundentakt zu
erfassen und den resultierenden Stellwert zu berechnen. Sehr häufiges
und heftiges Verfahren des Ventils führt nicht zwangsläufig zu besseren
Reglereigenschaften, verursacht aber Stellgeräusche und reduziert die
Batterielebensdauer des Antriebs.
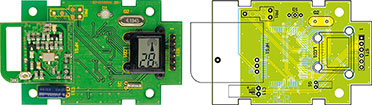
|
| Ansicht
der fertig bestückten Platine des FHT 8I mit zugehörigem Bestückungplan
links von der Bestückungsseite, rechts von der Lötseite |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (5 Seiten)
als PDF (5 Seiten)
Sie erhalten folgende Artikel:
- Serielles Funk-Interface FHT 8I – für die Ansteuerung von bis zu 4 Funk-Heizkörper-Ventilantrieben FHT 8V
- 1 x Journalbericht
- 1 x Schaltplan
Hinterlassen Sie einen Kommentar:
 Videos
Videos