 Videos
Videos
- Foren
- Technik-News
- Wissen
- FAQ-Datenbank
- Batterien, Akkus, Ladegeräte
- Bausätze, Lernpakete, Literatur
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic Components
- Hausautomation - Smart Home
- Haustechnik
- Kfz-Elektronik
- Klima-Wetter-Umwelt
- Messtechnik
- Modellsport, Freizeit
- Multimedia-SAT-TV
- Netzgeräte, Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkstatt, Labor
- Ratgeber
- Batterien - Akkus - Ladegeräte
- Bausätze
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic-Components
- Freizeit- und Outdoortechnik
- Hausautomations-Systeme
- Haustechnik
- Kfz-Technik
- Klima - Wetter - Umwelt
- Messtechnik
- Multimedia - Sat - TV
- Netzgeräte - Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkzeug - Löttechnik
- Elektronikwissen
- So funktioniert´s
- Praxiswissen
- FAQ-Datenbank
- Fachbeiträge
- ELVintern
- Experten testen
- Praxiswissen
- So funktioniert´s
- Hausautomation - Smart Home
- Haustechnik
- Beleuchtung
- Sicherheitstechnik
- Klima - Wetter - Umwelt
- Computer/Netzwerk
- Multimedia - Sat - TV
- Telefon - Kommunikation
- Kfz-Technik
- Stromversorgung
- HomeMatic-Know-how
- Freizeit- und Outdoortechnik
- Werkzeug - Löttechnik
- Messtechnik
- Fachmagazin & Abo
Artikel: 0 Summe: 0,00 EUR
Radar-Bewegungsmelder RBM 100


Aus ELVjournal 05/2007
0 Kommentare



Bausatzinformationen
 |  |  |  |
| 1 | 0,5 | OK | 5/07 |
Technische Daten
| Sendefrequenz | 24,125 GHz |
| Sendeleistung (EIRP) | 16 dBm |
| Sensor-Erfassung | horizontal 80°, vertikal 32° |
| Erfassungs-Distanz | 8-10 m |
| Erfassungsrichtung | durch Gehäuseboden, durch Gehäusedeckel oder seitlich |
| Schaltausgang | 1 x um, 230 V, 16 A |
| Ansprechempfindlichkeit | einstellbar |
| Einschaltdauer | einstellbar von 5 Sek. bis 3 Min. |
| Anzeigen | LED für die Einschaltdauer (optional, nach außen führbar) |
| Versorgungsspannung | 230 V, 50 Hz |
| Gehäuse-Schutzart | IP 65 |
| Gehäuseabmessungen | 150 x 90 x 55 mm |
Der im 24-GHz-Mikrowellenbereich nach dem Dopplerprinzip arbeitende Radar-Bewegungsmelder dient zur Detektion bewegter Objekte, unabhängig von deren Temperatur. Im Gegensatz zu IR-Bewegungsmeldern kann eine unsichtbare Montage (z. B. hinter Abdeckplatten) erfolgen, da Radarsensoren Materie durchstrahlen.
Allgemeines
Zur Erfassung von bewegten Objekten ist die Radartechnik hervorragend geeignet, hatte bisher aber immer den Ruf, gut, aber teuer zu sein. Durch den Einsatz von neuen Radarsensoren, wie in der hier vorliegenden Schaltung, sind mittlerweile auch kostengünstige Lösungen möglich. Im Gegensatz zu den weit verbreiteten Infrarot-Bewegungsmeldern ist zur Erfassung kein Temperaturunterschied zur Umgebung erforderlich, so dass nahezu beliebige bewegte Objekte erkennbar sind. Neben Menschen und Tieren reagieren Radarsensoren auch auf sich bewegende Fahrzeuge und Maschinenteile, aber auch auf unerwünschte Dopplersignale, hervorgerufen durch sich bewegende Bäume und Sträucher im Wind. Daher ist im Außenbereich eine sorgfältige Positionierung vorzunehmen. Im Innenbereich sollten Radar-Bewegungsmelder nicht in unmittelbarer Nähe von Leuchtstofflampen montiert werden, da dann nicht die volle Empfindlichkeit genutzt werden kann. Das Wort Radar kommt von Radio Detection and Ranging und bedeutet die Ortung und Zielerfassung durch elektromagnetische Wellen. Die Abstrahlung von elektromagnetischen Wellen im Mikrowellenbereich ist natürlich an enge gesetzliche Vorschriften gebunden. Sowohl die abgestrahlte Frequenz als auch die Sendeleistung sind genau einzuhalten und werden in Deutschland z. B. durch die Bundesnetzagentur überwacht. Die hier vorgestellte Schaltung arbeitet mit einem K-Band-Transceiver im 24-GHz-Bereich. Im Gegensatz zu anderen Sensoren, die im ebenfalls freigegebenen 9-GHz-Bereich arbeiten, sind deutlich geringere Abmessungen des Sensors realisierbar. Bei der abgestrahlten Sendeleistung kommt es auf die Spitzenleistung EIRP (equivalent isotopic radiated power) an. Im 24-GHz-Bereich sind maximal +20 dBm, entsprechend 100 mW, erlaubt. Bei getasteten Sensoren wird immer auf die Spitzenleistung zurückgerechnet. Das von uns eingesetzte, zugelassene Radar-Modul liefert eine Spitzenleistung von 16 dBm (EIRP) und erfüllt natürlich alle gesetzlichen Vorschriften.Das
Empfangsverhalten von Radarsensoren unterscheidet sich deutlich von
Bewegungssensoren auf Infrarotbasis. Während Infrarotsensoren relativ
unempfindlich auf Bewegungen in radialer Richtung reagieren, haben
Radarsensoren hier die höchste Empfindlichkeit. Bei ortogonalen bzw.
tangentialen Bewegungen zum Sensor ist es umgekehrt. In Kombination
ergänzen sich daher beide Techniken optimal. Unsichtbare Sensoren sind
allerdings nur mit der Radartechnik möglich, da Infrarotsensoren die
Wärmestrahlung des zu erfassenden Objekts detektieren müssen.
Infrarotsensoren können keine Objekte erfassen, deren Temperatur sich
nicht hinreichend von der Umgebungstemperatur unterscheidet, und
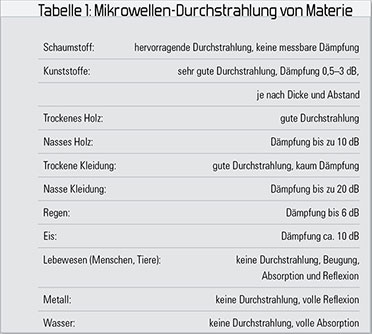
schnelle Temperaturwechsel führen zu Fehlauslösungen. Da Mikrowellen
Materie durchstrahlen, können Radarsensoren unsichtbar hinter nahezu
allen nicht metallischen Materialien „versteckt“ werden. In Verbindung
mit Alarmanlagen ermöglicht das den absolut sabotagesicheren Einbau.
Kunststoffe und trockenes Holz oder Keramik werden sehr gut
durchstrahlt.
 |
 |
| Bild 1: Der Radarsensor von InnoSent im Größenvergleich |

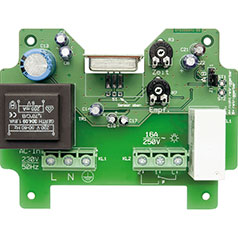
Der
eigentliche Radarsensor IPM-365 (links im Schaltbild) besitzt nur 3
Anschlüsse, bestehend aus Schaltungsmasse, Versorgungsspannung und dem
Doppler-Signalausgang. Für den Sensor stellt der Spannungsregler IC 3
eine stabilisierte Betriebsspannung von 3 V zur Verfügung. C 1 am
Ausgang des Spannungsreglers verhindert Schwingneigungen, und der
Kondensator C 2 dient zur Störunterdrückung. Da das
Mischer-Ausgangssignal des Sensors in der Größenordnung von nur 100 μV
liegt, ist eine Nachverstärkung von ca. 70 bis 80 dB erforderlich, um in
verarbeitbare Amplitudenbereiche zu kommen. Diese Aufgabe übernehmen
die beiden mit IC 1 realisierten Verstärkerstufen. Das Dopplersignal
wird über C 11 gleichspannungsmäßig entkoppelt dem nicht invertierenden
Eingang der ersten mit IC 1 A aufgebauten Stufe zugeführt. Über R 8
liegt der Arbeitspunkt des Verstärkers auf halber Betriebsspannung,
wobei C 14, C 15 Wechselspannungsanteile unterdrücken. Das Verhältnis
der Widerstände R 5 im Rückkopplungszweig und R 9 bestimmt die
Wechselspannungsverstärkung dieser Stufe. Während die Wechselspannung um
den Faktor 101 (ca. 40 dB) verstärkt wird, erfolgt aufgrund des
Kondensators C 16 keine Gleichspannungsverstärkung. Die untere
Grenzfrequenz wird somit durch den Kondensator C 16 festgelegt. C 8
begrenzt die obere Grenzfrequenz und dient gleichzeitig zur
Schwingneigungsunterdrückung. Das Ausgangssignal von IC 1 A wird direkt
auf den nicht invertierenden Eingang eines weiteren mit IC 1 B
aufgebauten Verstärkers gekoppelt. Die Verstärkung dieser Stufe ist mit
Hilfe des Trimmers R 7 im Bereich von ca. 18 dB bis ca. 40 dB
einstellbar. Hier bewirkt C 17 eine gleichspannungsmäßige Entkopplung
des Rückkopplungszweigs und C 9 dient zur Begrenzung der oberen
Grenzfrequenz. Das Ausgangssignal der zweiten Verstärkerstufe (IC 1 B)
wird direkt auf den mit IC 2 A, B aufgebauten Fensterkomparator gegeben.
Die Dimensionierung des Spannungsteilers R 1, R 11 bis R 13 bestimmt
die Schaltschwellen des Fensterkomparators.
Steigt
das Signal an Pin 5 oberhalb der an Pin 6 anliegen den Spannung
(Komparatorschwelle), wechselt der Ausgang (Pin 7) von „low“ nach
„high“. Der Ausgang von IC 2 A (Pin 1) wechselt von „low“ nach „high“,
wenn die Spannung an Pin 2 unter die an Pin 3 anliegende Spannung
abfällt. Über die Dioden D 1 und D 2 werden die Ausgangssignale
zusammengekoppelt und mit der positiven Flanke die mit IC 5 B aufgebaute
monostabile Kippstufe am positiven Trigger- Eingang (Pin 12)
getriggert. Ein Triggern bringt nun den Q-Ausgang auf High- und den
Q-Ausgang auf Low-Potential, wobei die Einschaltzeit mit R 3 zwischen 5
Sek. und ca. 3 Min. einstellbar ist. Wird Pin 11 von IC 5 B über J 1 mit
+5 V verbunden, so ist die Schaltung retriggerbar. Tritt mehr als eine
Triggerflanke während der Einschaltzeit auf, bestimmt das RC-Produkt von
R 3, R 16, C 22 die Länge der Verzögerung nach der letzten
Triggerflanke. Wird hingegen Pin 11 (negativer Trigger-Eingang) über J 1
mit dem Q-Ausgang (Pin 10) verbunden, so besteht keine
Retrigger-Möglichkeit. Für einen definierten Power-on-Reset sorgen im
Einschaltmoment die Bauelemente R 2 und C 21. Die zweite mit IC 5 A
aufgebaute monostabile Kippstufe verhin dert ein Retriggern der
Schaltung beim Abfallen des Relais. Der Q-Ausgang von IC 5 B steuert
über den Basisspannungsteiler R 17, R 19 den Relaistreiber T 1, in
dessen Kollektorkreis sich das Leistungsrelais mit Freilaufdiode (D 5)
befindet. Eine über R 4 mit Spannung versorgte optionale Kontroll-LED
kann zur Anzeige der Relais-Aktivierung dienen. Das 16-A-Leistungsrelais
ist sowohl zum Schalten einer Kleinspannung als auch zum Schalten der
230-V-Netzwechselspannung geeignet. Mit Ausnahme des Sensors stellt der
Spannungsregler IC 4 die stabilisierte Versorgungsspannung für die
gesamte Elektronik zur Verfügung. C 6 und C 7 dienen zur Pufferung und
zur Störunterdrückung. Die unstabilisierte Betriebsspannung (+UB)
liefert ein eingebautes 230-V-Netzteil (rechts im Schaltbild). An die
Schraubklemme KL 1 wird die eingangsseitige Netz-Wechselspannung
angeschlossen, die von hier aus direkt auf die primäre Wicklung des
Netztransformators TR 1 gelangt. Da der Netztrafo dauerkurzschlussfest
ist, wird keine Netzsicherung benötigt. Nach der Gleichrichtung der
sekundärseitigen Wechselspannung mit D 6 bis D 9 gelangt die mit C 13
gepufferte unstabilisierte Betriebsspannung (+UB) auf den Eingang des
Spannungsreglers IC 4 und dient des Weiteren zur Versorgung des
Leistungsrelais REL 1.
Nachbau
Der größte Teil der Elektronik des Radar-Bewegungsmelders RBM 100 ist in SMD-Ausführung realisiert und bereits werkseitig vorbestückt. Da von Hand nur noch wenige Komponenten in bedrahteter Bauform zu verarbeiten sind, ist der praktische Aufbau recht schnell erledigt. Wir beginnen mit den beiden Einstelltrimmern R 3 und R 7, in liegender Position, die vor dem Verlöten plan auf der Platinenoberfläche aufliegen müssen. Vorsicht! Beim Verlöten ist eine zu lange Hitzeeinwirkung auf diese Bauteile zu vermeiden. Zur Aufnahme des Codiersteckers J 1 wird eine 3-polige Stiftleiste eingelötet und gleich mit dem zugehörigen Codierstecker bestückt. Danach sind die Elektrolyt-Kondensatoren an der Reihe. Vorsicht, unbedingt auf korrekte Polarität achten! Falsch gepolte Elkos können auslaufen oder sogar explodieren.Die
Leuchtdiode D 4 ist entsprechend des Symbols im Bestückungsdruck an die
Lötstifte ST 1 und ST 2 anzulöten. Am Bauteil ist die Polarität einfach
am längeren Anodenanschluss (+) zu erkennen. Im nächsten Arbeitsschritt
sind die beiden Schraubklemmen KL 1 und KL 2 zu bestücken. Vor dem
Festsetzen mit ausreichend Lötzinn ist darauf zu achten, dass diese
Bauteile plan auf der Platinenoberfläche aufliegen. Das Gleiche gilt
auch für das Leistungsrelais REL 1 und den Netz-Transformator TR 1 in
Printausführung. Je nach gewünschter Erfassungsrichtung gibt es für das
Radar- Sensormodul S 1 drei unterschiedliche Einbaumöglichkeiten, die in
den Abbildungen 3 bis 5 zu sehen sind.



Wird
der Sensor an der Platinenunterseite (SMD-Seite) montiert (Abbildung
3), erfolgt die Erfassung durch den Gehäuseboden. Diese Einbaulage ist
sinnvoll, wenn der Radar- Bewegungsmelder z. B. hinter einer
Abdeckplatte montiert wird und die Erfassung der bewegten Objekte durch
die Platte erfolgen soll. Die zweite Einbauvariante ist in Abbildung 4
zu sehen und sinnvoll bei der Montage des Bewegungsmelders auf einer
Wand. Die Erfassung erfolgt in diesem Fall durch den Gehäusedeckel. Als
dritte Möglichkeit steht die vertikale Montageposition des Sensors zur
Verfügung, wie in Abbildung 5 zu sehen. Die Objekterfassung erfolgt dann
an der gegenüberliegenden Seite der Schraubklemmen
(Anschlussleitungen).
Achtung!
Beim Radar-Modul handelt es sich um ein ESD-empfindliches Bauelement,
das durch statische Aufladung leicht gefährdet ist. Bei allen Arbeiten
mit einem nicht eingelöteten Radar-Modul ist darauf zu achten, dass die
daran arbeitenden Personen nebst Hilfsmitteln nach ESD-Vorschriften
geschützt sind. Dies beginnt bereits beim Herausnehmen des Moduls aus
der Verpackung, wobei es am sichersten ist, das Modul lediglich seitlich
an der Platine zu greifen, jedoch nie die drei Anschlüsse der
Stiftleiste zu berühren. Ist das Modul erst einmal in die Schaltung
eingelötet, besteht nahezu keine Gefahr mehr, den Sensor zu zerstören.
Nach dem Einlöten des Radar-Moduls ist die Platine bereits vollständig
bestückt und kann in das dafür vorgesehene Gehäuse eingebaut werden. Der
Gehäuseeinbau ist abhängig von der Montageposition des Sensors. Bei der
Objekterfassung durch den Gehäusedeckel oder von der Seite wird die
Platine direkt in das Gehäuseunterteil gesetzt und mit vier Schrauben M3
x 6 mm fest verschraubt. Unter jedem Schraubenkopf ist eine M3-
Zahnscheibe unterzulegen. Bei der Objekterfassung durch den Gehäuseboden
(Radarsensor ist an der Platinenunterseite, SMD-Seite, montiert)
benötigt die Platine einen zusätzlichen Abstand von 10 mm zum
Gehäuseboden. In diesem Fall werden zwischen der Platine und den
Schraubdomen im Gehäuseunterteil vier Abstandsröllchen von 10 mm Länge
gesetzt. Die Leiterplattenbefestigung erfolgt dann mit Schrauben M3 x 16
mm, wobei auch hier unter jedem Schraubenkopf eine M3-Zahnscheibe
erforderlich ist. Wird die Montage des Bewegungsmelders in einem
Innenraum vorgenommen, so kann die Relaisaktivierung durch eine an ST 1
und ST 2 anzuschließende Leuchtdiode angezeigt werden. Im Gehäuse bzw.
Gehäusedeckel ist dann eine 3-mm- Bohrung vorzunehmen, in die die
Leuchtdiode eingeklebt wird (VDE-Vorschriften beachten!). Die
Verlängerung der Anschlüsse erfolgt mit 1-adrig isolierten
Leitungsabschnitten. Nach Einstellen der Ansprechempfindlichkeit mit R 7
und der Relais-Aktivierungszeit mit R 3 wird der Gehäusedeckel
aufgesetzt und mit den vier zugehörigen Deckelschrauben aus rostfreiem
V2A-Stahl verschraubt. Bei der Montage des Radar-Bewegungsmelders sind
unbedingt alle geltenden VDE- und Sicherheitsvorschriften zu beachten.


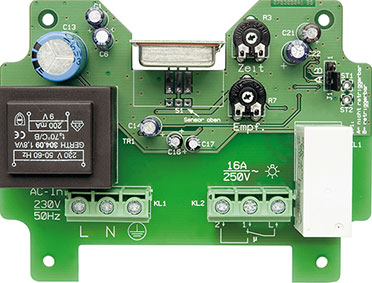

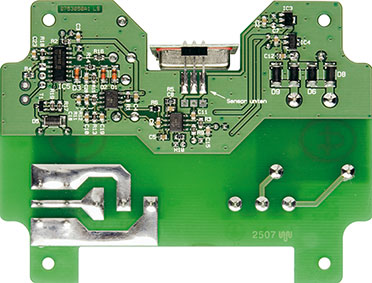
 |
| Ansicht der fertig bestückten Platine des RBM 100 mit zugehörigem Bestückungsplan von der Unterseite |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen: als Online-Version
als Online-Version als PDF (6 Seiten)
als PDF (6 Seiten)Sie erhalten folgende Artikel:
- Radar-Bewegungsmelder RBM 100
- 1 x Journalbericht
- 1 x Schaltplan
| Foren |
Hinterlassen Sie einen Kommentar:


