KeyMatic®-Transponder-Interface KM300 TI
Aus ELVjournal
06/2007
0 Kommentare
Technische Daten
| Transponder-Typ | 64 Bit (Read only) |
| Trägerfrequenz | 125 kHz |
| Modulation | Absorptionsmodulation (Manchester-Code) |
| Erfassungsabstand | ca. 3 cm |
| Schaltberechtigte Transponder | bis max. 24 |
| Programmierung | nur mit Master-Transponder möglich |
| Aktivierung der Leseeinheit | über kapazitiven Näherungssensor |
| Quittungssignal | akustisch, optionale LED-Anzeige |
| Funkübertragung | Wechselcode (Rolling-Code) |
| Sendefrequenz | 868,35 MHz |
| Spannungsversorgung | 3 x Mignon (LR6/AA) oder DC, 5 V bis 16 V (extern) |
| Stromaufnahme (Batteriebetrieb) | <30 uA |
| Gehäuse-Schutzart | IP 66 |
| Gehäuseabmessungen | 120 x 90 x 50 mm |
Das
KeyMatic-Transponder-Interface KM300 TI ermöglicht die Nutzung von
Passiv-Transpondern in Verbindung mit dem
KeyMatic-Funk-Türschlossantrieb. Ohne Installationsaufwand kommuniziert
das batteriebetriebene Interface über eine sichere Funkverbindung im
Rolling-Code-Verfahren (Wechselcode) mit dem Türschlossantrieb.Allgemeines
Das
KeyMatic-Funk-Türschloss-Antriebssystem dient zum Ver- und Entriegeln
von Zylinder-Türschlössern mit einer kleinen Fernbedienung. Wenn mehrere
Personen eine Zugangsberechtigung erhalten sollen, ist das
KeyMatic-Transponder- Interface eine kostengünstige und interessante
Alternative zu einer entsprechenden Anzahl von Funk-Fernbedienungen.Bei
Passiv-Transpondern handelt es sich um elektronische Schlüssel zur
berührungslosen Identifikation und zur Zutrittskontrolle in Form von
Schlüsselanhängern oder im Scheckkartenformat. Passiv-Transponder sind
mittlerweile weit verbreitet in Systemen zur Zeiterfassung in Betrieben
und zur Zugangsregelung zu Sicherheitsbereichen. Im Gegensatz zu
mechanischen Schalt- und Schließsystemen sind die hermetisch gekapselten
Datenträger völlig verschleiß- und wartungsfrei. Da die Energiezufuhr
induktiv nach dem Transformator-Prinzip erfolgt, wird nicht einmal eine
Batterie benötigt.
|
| Bild 1: Ein Passiv-Transponder |
Wichtig!
Der Master-Transponder kann nicht gelöscht und somit nicht neu angelegt
werden. Bei Verlust des Master-Transponders sind keine Veränderungen am
System mehr möglich. Der
Mikrocontroller im KM300 TI prüft, ob die Identifikationsnummer des
Transponders im Erfassungsbereich der Lese einheit mit einer
gespeicherten Information übereinstimmt. Bei Übereinstimmung wird dann
der entsprechende Befehl verschlüsselt im Rolling-Code-Verfahren
(Wechselcode) zum Türschlossantrieb gesendet. Durch die sichere
Funkverbindung ist das System gegen Missbrauch geschützt. Über 17
Billionen Codiermöglichkeiten machen ein Ermitteln des Codes durch
Probieren unmöglich. Sowohl die Transponder als auch die Funkverbindung
bieten eine hohe Sicherheit. Die Schaltung des
KeyMatic-Transponder-Interfaces KM300 TI ist für den Betrieb mit drei
Mignon-Batterien (LR6/AA) vorgesehen. Um einen besonders geringen
Stromverbrauch zu erreichen, ist die Transponder-Leseeinheit im
Bereitschaftszustand ausgeschaltet. Erst durch Berühren des Gehäuses im
Bereich eines kapazitiven Näherungssensors werden Transponder im
Erfassungsbereich erkannt. Durch diese Schaltungsmaßnahme wird zum
Beispiel bei zehn Öffnungs- und Verriegelungsvorgängen am Tag eine
Batterielebensdauer von drei bis fünf Jahren erreicht. Alternativ zur
Batterieversorgung besteht auch die Möglichkeit, das Gerät durch eine
externe Gleichspannung zwischen 5 V und 16 V zu versorgen. Die Spannung
ist dann an einer internen Schraubklemme zuzuführen. Bei externer
Versorgung kann der Berührungssensor deaktiviert werden. Datenstruktur der Passiv-Transponder
In
den Passiv-Transpondern ist eine 64-Bit-Informationsnummer gespeichert,
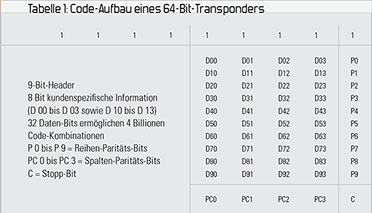
die dabei in 5 Gruppen aufgeteilt ist. Tabelle 1 zeigt den Code-Aufbau.
Die ersten 9 Bit sind maskenprogrammiert immer 1 und dienen als Header.
Dann sind 10 Reihen-Paritäts-Bits (P 0 bis P 9) und 4
Spalten-Paritäts-Bits (PC 0 bis PC 3) vorhanden. Die Daten-Bits D 00 bis
D 03 sowie D 10 bis D 13 enthalten kundenspezifische Informationen. 32
Daten-Bits erlauben 4 Billionen unterschiedliche Code-Kombinationen. Das
Stopp-Bit (C) ist grundsätzlich auf logisch 0 gesetzt. Für die
Datenübertragung wird der 125-kHz-Träger abhängig von den 64 Daten-Bits
amplitudenmoduliert.Bedienung und Funktion
Das
KeyMatic-Transponder-Interface KM300 TI kommt völlig ohne
Bedienelemente aus, da nach der Konfigurierung und dem Speichern der
schaltberechtigten Transponder inder „Zutrittsliste“ nur noch der
kapazitive Näherungsschalter zu berühren und der Transponder im
Erfassungsbereich der Lesespule zu halten ist. Wenn die
64-Bit-Information des Transponders mit einer abgespeicherten
Information exakt übereinstimmt, wird die Schaltaktion ausgeführt. Damit
das Modul überhaupt auf schaltberechtigte Transponder reagieren kann,
müssen die zugehörigen Identifikationscodes im Programmier-Modus in
einer so genannten Zutrittsliste gespeichert werden. Damit diese
Zutrittsliste nicht von Unbefugten verändert oder manipuliert werden
kann, ist zum Programmieren des Systems ein „Master-Transponder“
erforderlich, der an einem sicheren Ort aufzubewahren ist. Nur durch
„Vorzeigen“ dieses Transponders ist später der Programmier- Modus des
Systems wieder aufrufbar und z. B. das Hinzufügen von einzelnen
Transpondern möglich. Nach dem ersten Anlegen der Betriebsspannung
befindet sich die Schaltung automatisch im Programmier-Modus, wo zuerst
das EEPROM initialisiert wird. Nach ca. 5 Sekunden kann dann der erste
Transponder vor die Antenne der Leseeinheit gehalten werden. Dieser
Transponder wird als Master-Transponder abgelegt und ist nicht zum
Schalten zu nutzen. Alle weiteren Transponder, die eine
Schaltberechtigung erhalten sollen, sind dann nacheinander in den
Bereich der Erfassungsspule zu halten und werden vom System als Slave-
Transponder abgespeichert. Die Abspeicherung jedes neuen Transponders
wird mit 3 kurzen „Beeps“ an der Leseeinheit und durch 3-maliges Blinken
der „OK“-LED angezeigt. Insgesamt sind vom System bis zu 24
Slave-Transponder speicherbar. Ist ein vorgehaltener Transponder bereits
abgespeichert, so wird dieser nicht noch einmal gespeichert, und es
ertönt ein langer Signalton. Der Programmier-Modus wird automatisch
verlassen, wenn ca. 15 Sekunden kein Transponder in den
Erfassungsbereich der Empfangsspule gehalten wird. Das System ist damit
betriebsbereit. Auch nach der ersten Konfigurierung und Inbetriebnahme
können jederzeit weitere Transponder hinzugefügt werden, solange in der
Zutrittsliste noch nicht 24 Transponder gespeichert sind. Um weitere
Transponder abspeichern zu können, ist es erforderlich, den
Master-Transponder in den Erfassungsbereich der Leseeinheit zu halten.
Sobald der Master-Transponder erkannt wurde, befindet sich das System
wieder im Programmier- Modus, wie nach dem ersten Anlegen der
Betriebsspannung. Bereits vorher gespeicherte Transponder bleiben
natürlich beim Hinzufügen von weiteren Transpondern erhalten. Auch ohne
Betriebsspannung bleibt die Zutrittsliste im nichtflüchtigen Speicher
des Systems nahezu unbegrenzt erhalten (mindes tens 10 Jahre). Gelöscht
werden kann nur die gesamte Zutrittsliste, jedoch nicht einzelne
Transponder. Dazu ist die Betriebsspannung abzuschalten, der
Codierstecker J 2 umzustecken (Pin 1 und Pin 2 verbinden) und die
Betriebsspannung wieder anzulegen. Nachdem der Master-Transponder in den
Erfassungsbereich der Lesespule gehalten wurde, beginnt mit einem
langen Signalton bzw. einem langen Leuchtimpuls der LED „OK“ der
Löschvorgang. Die Betriebsspannung ist danach wieder abzuschalten und
der Codierstecker J 2 ist wieder in die Ausgangsstellung zu bringen.
Nach dem Anlegen der Betriebsspannung ist im Programmier-Modus (mit
Master-Transponder aufrufen) das Speichern der schaltberechtigten
Transponder von neuem möglich. Das Einlesen der neuen Transponder
erfolgt dann wie bei der Erstinbetriebnahme. Im normalen Betrieb ist die
Bedienung des KeyMatic-Transponder- Interfaces KM300 TI sehr einfach.
Zum Verriegeln der Tür ist die Leseeinheit über den kapazitiven
Näherungsschalter zu aktivieren und der Transponder einmal in den
Erfassungsbereich der Lesespule zu bringen. Sobald ein berechtigter
Transponder erkannt wird, quittiert das Interface dies durch ein kurzes
akustisches Signal, und die Kontroll-LED leuchtet kurz auf. Nicht
berechtigte Transponder mit korrektem Datenprotokoll verursachen ein
langes Quittungssignal. Das Verriegeln der Tür erfolgt mit ca. 3
Sekunden Verzögerung, signalisiert durch drei kurze Quittungssignale.
Zum Öffnen der Tür ist der Transponder 2-mal kurz hintereinander
(innerhalb von 3 Sekunden) in den Erfassungsbereich der Lesespule zu
bringen. Auch das Öffnen wird nach kurzer Verzögerung mit drei kurzen
Quittungssignalen signalisiert. Im normalen Anwendungsfall sind die
Funktionen Verriegeln und Öffnen vollkommen ausreichend. Es besteht aber
auch die Möglichkeit, die Tür zu entriegeln, ohne diese zu öffnen. Dazu
ist der Transponder 3-mal kurz hintereinander in den Erfassungsbereich
der Lesespule zu halten.Schaltung
Die
Schaltung des KeyMatic-Transponder-Interfaces KM300 TI besteht aus der
Transponder-Leseeinheit (als zugelassenes Modul auch in anderen
ELV-Schaltungen zu finden) und aus der Mikrocontrollereinheit mit der
Funkübertragung zum Türschlossantrieb. Während die Leseeinheit zur
Erfassung der Passiv-Transponder dient und diese dabei gleichzeitig mit
Energie versorgt, erfolgen die Code-Auswertung, der Vergleich mit der
Zutrittsliste und die verschlüsselte Datenübertragung zum
Türschlossantrieb durch die Mikrocontrollereinheit.Schaltung der Leseeinheit

|
| Bild 2: Schaltbild der Leseeinheit |
Schaltung der Mikrocontrollereinheit

|
| Bild 3: Schaltbild der Basisplatine |
Bei
der Sensorfläche handelt es sich um eine selbstklebende Metallfolie,
die in die Innenseite des Gehäuses geklebt wird. Die Erfassung der sich
nähernden Hand erfolgt durch das Kunststoffgehäuse. Der Näherungssensor
ist absolut verschleißfrei, vandalismussicher und vor Staub und
Feuchtigkeit geschützt. Um die Transponder-Lesespule möglichst wenig zu
beeinflussen, wird empfohlen, die Sensorfläche im oberen oder seitlichen
Bereich des Gehäuses einzukleben. Quasi kann aber jede Außenfläche des
Gehäuses zur Sensorfläche gemacht werden. Das Sensor-IC (IC 4) enthält
alle erforderlichen Funktionen zur Realisierung des
Kapazitäts-Näherungssensors und benötigt nur eine minimale externe
Beschaltung. Die an ST 1 angeschlossene Sensorfläche ist über den mit R 2
und C 9 aufgebauten Tiefpass zur Störunterdrückung mit dem IC-Eingang
verbunden. Der in EE102P integrierte Taktoszillator erzeugt in
Verbindung mit C 10 eine Abtastfrequenz von ca. 1 kHz. Neben der
Ausführung der Sensorfläche ist die Größe des Kondensators C 11
entscheidend für die Empfindlichkeit des Systems. Die Aktivierungsdauer
des als Timer arbeitenden Ausgangs wird durch den Kondensator C 8
bestimmt. Wenn die Betriebsspannung an der Transponder-Leseeinheit
anliegt, wird das ASIC (IM 283) über Port P3.3 des Mikrocontrollers
eingeschaltet und der Takt zum Auslesen der Transponder-Informationen
des IM 283 steht an Port P3.2 zur Verfügung. Die von der Leseeinheit
kommenden Daten ge langen dann zum Port P1.1 des Mikrocont rollers. Mit
dem von Port P3.1 kommenden Signal „Restart“ wird das ASIC für einen
neuen Code-Empfang vorbereitet. Sobald der Controller einen gültigen
Code von der Leseeinheit detektiert, wird dies dem Mikrocontroller über
die Found-Leitung an Port P1.2 mitgeteilt. Bei Code-Übereinstimmung mit
einer Eintragung in der Berechtigungsliste wird je nachdem, wie oft der
Transponder in den Erfassungsbereich der Lesespule gehalten wird, die
entsprechende Aktion (Öffnen, Verriegeln oder Entriegeln) ausgeführt. Der
in der Leseeinheit untergebrachte akustische Signalgeber und die
Quittungs-LED D 6 werden über den Transistor T 2 von Port P2.3
gesteuert. R 8 dient dabei zur Anpassung der Signalamplitude und somit
zur Lautstärkeanpassung. Unten im Schaltbild ist die recht einfache
Spannungsversorgung des KM300 TI dargestellt. Bei der Batterieversorgung
sind die beiden oberen Kontakte des Codiersteckers J 1 miteinander
verbunden. Über den Sicherungswiderstand R 1 gelangt die
Batteriespannung dann direkt auf den Eingang des Spannungsreglers IC 6.
Soll die Einheit mit einer externen Spannung versorgt werden, ist an KL 1
eine Gleichspannung zwischen 5 V und 16 V anzulegen und die beiden
unteren Kontakte von J 1 sind miteinander zu verbinden. Bei der externen
Spannungsversorgung ist folgender Hinweis noch zu beachten: Zur
Gewährleistung der elektrischen Sicherheit muss es sich bei der
speisenden Quelle um eine Sicherheits-Schutzkleinspannung handeln.
Außerdem muss es sich um eine Quelle begrenzter Leistung handeln, die
nicht mehr als 15 W liefern kann. Üblicherweise werden beide Forderungen
von einfachen 12-V-Steckernetzteilen mit bis zu 500 mA
Strombelastbarkeit erfüllt. Über den Widerstand R 13, die
Verpolungsschutzdiode D 1 und J 1 gelangt die externe Spannung auf den
Puffer-Elko C 1 und den Eingang des Spannungsreglers IC 6. Sowohl bei
Batteriebetrieb als auch bei externer Spannungsversorgung steht am
Ausgang von IC 6 eine stabilisierte Gleichspannung von 3 V zur
Verfügung. C 4 dient zur Pufferung und Schwingneigungsunterdrückung und
die Kondensatoren C 3, C 5 und C 6 verhindern hochfrequente
Störeinkopplungen. Nachbau
Der
praktische Aufbau des KeyMatic-Transponder-Interfaces KM300 TI ist
besonders einfach, da auf beiden Leiterplatten im Wesentlichen
SMD-Komponenten zum Einsatz kommen und diese bei allen ELV-Bausätzen
bereits werkseitig vor bestückt sind. Von Hand sind daher nur noch
wenige konventionelle Bauelemente zu bestücken. Die Bestückungsarbeiten
beginnen wir mit der Leseeinheit, wo zuerst eine Drahtbrücke aus
versilbertem Schaltdraht einzulöten ist. Nach dem Verlöten werden die
überstehenden Drahtenden direkt oberhalb der Lötstellen abgeschnitten,
ohne dabei die Lötstellen selbst zu beschädigen. Danach wird der
Sound-Transducer PZ 1 mit korrekter Polarität eingelötet. Sowohl am
Bauteil als auch im Bestückungsdruck der Leiterplatte ist die Polarität
gekennzeichnet. Die Antennenspule wird, wie auf dem Platinenfoto zu
sehen ist, mit zwei Kabelbindern auf der Platinenoberfläche befestigt.
Alsdann sind die Anschlussleitungen auf die erforderliche Länge zu
kürzen, vorzuverzinnen und an die zugehörigen Platinenanschlüsse dem
Platinenfoto entsprechend anzulöten. Damit ist die Leseeinheit bereits
fertig aufgebaut. Die Mikrocontrollereinheit besteht aus einer
doppelseitigen Leiterplatte mit den Abmessungen 79 x 78 mm. Da, wie
bereits erwähnt, alle SMD-Teile vorbestückt sind, ist auch dieser Aufbau
schnell erledigt und recht unkompliziert. Damit keine Manipulationen
durch Unbefugte vorgenommen werden können, sind alle
sicherheitsrelevanten Baugruppen auf der Leiterplatte vergossen und
selbst bei Demontage nicht mehr zugänglich. Bei der Basisplatine werden
zuerst, wie auf dem Platinenfoto zu sehen, drei Elektrolyt-Kondensatoren
in liegender Position bestückt. Dabei ist unbedingt die korrekte
Polarität zu beachten, da falsch gepolte Elkos auslaufen oder sogar
explodieren können. Üblicherweise ist die Polarität bei Elkos am
Minuspol gekennzeichnet. Nach dem Verlöten sind auch hier die
überstehenden Drahtenden oberhalb der Lötstellen abzuschneiden. Im
nächsten Arbeitsschritt werden die drei 3-poligen Stiftleisten J 1 bis J
3 bestückt und die zugehörigen Codierstecker aufgesetzt. Die
Schraubklemme KL 1 muss vor dem Festsetzen mit ausreichend Lötzinn plan
auf der Platinenoberfläche aufliegen. Zum Anschluss der
Transponder-Leseeinheit ist an der SMDSeite eine 8-polige Stiftleiste zu
bestücken. Das Verlöten der Stifte erfolgt an der Platinenunterseite.
Die Kunststoffgehäuse der Batteriehalter sind in die dafür vorgesehenen
Schlitze der Leiterplatte einzurasten. Dabei ist darauf zu achten, dass
das Batteriesymbol auf der Leiterplatte durch die Aussparung im
mittleren Bereich der Batteriehalter zu sehen ist. Es folgt das
Einsetzen der Batteriekontakte, wobei es sinnvoll ist, jeweils vor dem
Verlöten an der SMDSeite eine Batterie zur Fixierung einzusetzen. Damit
beim Lötvorgang der Lötspitze nicht zu viel Hitze entzogen wird, ist
eine ausreichend große Lötspitze zu verwenden.
|
| Bild 4: Eingeklebte Sensorfläche im Gehäuseoberteil |

|
| Bild 5: Bohrplan für den optional einzusetzenden Kunststoff-Lichtwellenleiter |

|
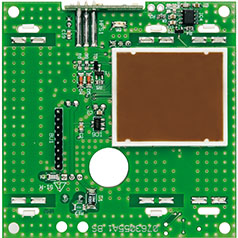
| Bild 6: Basisplatine mit bestückter Transponder-Leseeinheit |

|
| Bild 7: An die Basisplatine angelötetes Funk-Sendemodul |

|
| Fertig aufgebaute Elektronik des KM300 TI |
 und von der Unterseite (unten)")
|
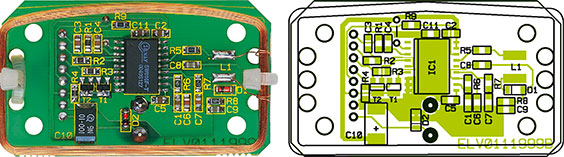
| Ansicht
der fertig bestückten Basisplatine des KM300 TI mit zugehörigem
Bestückungsplan von der Oberseite (oben) und von der Unterseite (unten) |
, rechts von der Unterseite")
|
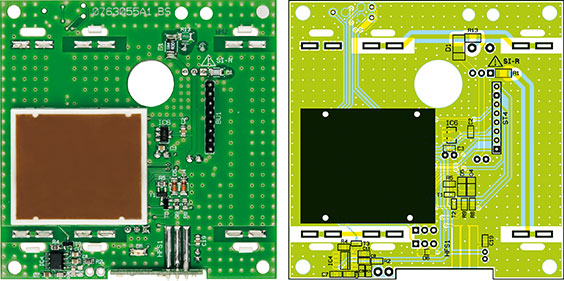
| Ansicht
der fertig bestückten Leseeinheit mit zugehörigem Bestückungsplan,
links von der Lötseite (SMD), rechts von der Unterseite |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen:
 als Online-Version
als Online-Version
 als PDF (9 Seiten)
als PDF (9 Seiten)
Sie erhalten folgende Artikel:
- KeyMatic®-Transponder-Interface KM300 TI
- 1 x Journalbericht
- 1 x Schaltplan
Hinterlassen Sie einen Kommentar:
 Videos
Videos