 Videos
Videos
- Foren
- Technik-News
- Wissen
- FAQ-Datenbank
- Batterien, Akkus, Ladegeräte
- Bausätze, Lernpakete, Literatur
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic Components
- Hausautomation - Smart Home
- Haustechnik
- Kfz-Elektronik
- Klima-Wetter-Umwelt
- Messtechnik
- Modellsport, Freizeit
- Multimedia-SAT-TV
- Netzgeräte, Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkstatt, Labor
- Ratgeber
- Batterien - Akkus - Ladegeräte
- Bausätze
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic-Components
- Freizeit- und Outdoortechnik
- Hausautomations-Systeme
- Haustechnik
- Kfz-Technik
- Klima - Wetter - Umwelt
- Messtechnik
- Multimedia - Sat - TV
- Netzgeräte - Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkzeug - Löttechnik
- Elektronikwissen
- So funktioniert´s
- Praxiswissen
- FAQ-Datenbank
- Fachbeiträge
- ELVintern
- Experten testen
- Praxiswissen
- So funktioniert´s
- Hausautomation - Smart Home
- Haustechnik
- Beleuchtung
- Sicherheitstechnik
- Klima - Wetter - Umwelt
- Computer/Netzwerk
- Multimedia - Sat - TV
- Telefon - Kommunikation
- Kfz-Technik
- Stromversorgung
- HomeMatic-Know-how
- Freizeit- und Outdoortechnik
- Werkzeug - Löttechnik
- Messtechnik
- Fachmagazin & Abo
Artikel: 0 Summe: 0,00 EUR
FS20-Radarbewegungsmelder FS20 RBM


Aus ELVjournal 01/2008
0 Kommentare


Bausatzinformationen
 |  |  |  |
| - | - | - |
Inhalt des Fachbeitrags
Technische Daten
| Sendefrequenz (Radarmodul) | 24,125 GHz |
| Sendeleistung, EIRP (Radarmodul) | 16 dBm |
| Radar-Erfassung | horizontal 80°, vertikal 32° |
| Erfassungs-Distanz | 6 m bis 10 m (je nach Einbaulage und Anwendung) |
| Erfassungsrichtung | durch Gehäuseboden, durch Gehäusedeckel oder seitlich |
| Ansprechempfindlichkeit | 4 Stufen konfigurierbar |
| Programmierung/Konfiguration | über 4 Taster im Gerät |
| Anzeigen | LED für Programmierung und Quittungssignal |
| Sendekanäle | 2, getrennt konfigurierbar |
| FS20-Sendefrequenz | 868,35 MHz |
| Modulation | AM |
| FS20-Reichweite | bis 100 m (Freifeld) |
| Versorgungsspannung | 4,5 bis 7 VDC |
| Gehäuse-Schutzart | IP 65 |
| Gehäuseabmessungen (B x H x T) | 115 x 55 x 90 mm |
Beim FS20 RBM handelt es sich um einen Funk-Bewegungsmelder, der durch den Einsatz von innovativer Radartechnik zur Detektion bewegter Objekte, vollkommen unabhängig von deren Temperatur, einzusetzen ist. Sobald bewegte Objekte im Erfassungsbereich detektiert werden, erfolgt die Aussendung eines FS20-Befehls auf zwei getrennt konfigurierbaren Kanälen.
Allgemeines
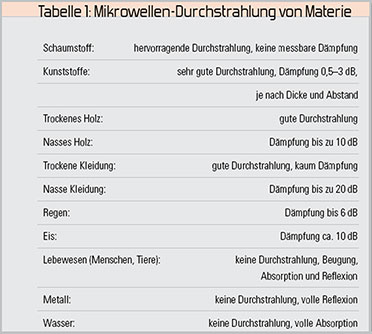
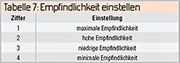
Der FS20-Radarbewegungsmelder arbeitet mit einem Radarsensor im 24-GHz-Mikrowellenbereich nach dem Dopplerprinzip. Da Radarwellen verschiedene Arten von Materie durchstrahlen, kann eine vollkommen unsichtbare Montage erfolgen, z. B. hinter Abdeckungen aus Holz oder Kunststoff. Des Weiteren ist zur sicheren Erfassung kein Temperaturunterschied zur Umgebung erforderlich, wodurch neben Lebewesen auch beliebige Gegenstände aus leitendem Material erfasst werden können. Zur Anpassung an die individuellen Gegebenheiten stehen beim FS20-Radarsensor 4 wählbare Ansprechempfindlichkeiten zur Verfügung, wobei die Erfassungsdistanz im Freifeld ca. 6 bis 10 m beträgt. Innerhalb von Gebäuden kann sich die Distanz aufgrund von Reflexionen sogar erhöhen. Der horizontale Erfassungswinkel beträgt 80° und vertikal werden Bewegungen in einem Winkel von 32° erfasst. Das Aussenden der FS20-Befehle kann beim FS20 RBM auf zwei getrennt konfigurierbaren Kanälen erfolgen, wobei auch für beide Kanäle getrennte Ansprechempfindlichkeiten defi- niert werden können. Des Weiteren lassen sich die Kanäle einzeln aktivieren und deaktivieren.Der
Betrieb des FS20 RBM ist sowohl mit Batterien (3 x LR6, Mignon) als
auch mit einer externen Versorgungsspannung möglich. Bei Batteriebetrieb
ist das Gerät vollkommen mobil einsetzbar, wobei die
Batterielebensdauer ca 3 bis 4 Monate beträgt. Natürlich ist auch der
Einsatz von wiederaufladbaren Akkus möglich. Bei fester Installation
empfiehlt es sich, das Gerät mit einer externen Gleichspannung zwischen
4,5 V und 7 V zu versorgen. Durch 3 unterschiedliche
Montagemöglichkeiten des eigentlichen Sensors und auf der Basis, dass
Mikrowellen Materie durchstrahlen, kann die Objekterfassung durch den
Gehäuseboden, durch den Gehäusedeckel oder seitlich durch die
Gehäusewand erfolgen. Der unsichtbare (versteckte) Einbau des Gerätes
wird dadurch erheblich erleichtert. Das Gerät kann bei der Erfassung
durch den Gehäuseboden z. B. einfach auf eine Zwischendecke gelegt oder
rückseitig hinter eine Holzverkleidung geschraubt werden.
Natürlich
werden vom FS20 RBM die geltenden Vorschriften, die bei der Abstrahlung
von elektromagnetischen Wellen im Mikrowellenbereich gelten, genau
eingehalten. Getrennte Sende- und Empfangsantennen sorgen bei dem von
uns eingesetzten Radarsensor von InnoSent für eine hohe Empfindlichkeit,
und durch planare Anordnung der Antennenstrukturen wird eine besonders
flache Bauweise des eigentlichen Sensormoduls ermöglicht. Auch wenn
Radarwellen Kunststoff- Materialien sehr gut durchstrahlen, muss immer
ein Luftzwischenraum von ca. 6 mm zwischen den Antennenstrukturen und
der Abdeckung bleiben. Beim Gehäuse ist zu beachten, dass
Lackbeschichtungen und Verschmutzungen eine deutliche Dämpfung bewirken
können.
 |
Die Einsatzmöglichkeiten des FS20 RBM sind vielfältig, da per Funk beliebige FS20-Funkempfänger angesteuert werden können. Das Gerät ordnet sich komplett in das FS20-Codeund- Adresssystem ein. Zur FS20-Programmierung sind auf der Leiterplatte 4 Taster und eine Kontroll-LED vorhanden. Die LED leuchtet bei den verschiedenen Programmierfunktionen und beim Aussenden eines FS20-Befehls kurz auf. Die komplette Elektronik des FS20-Radarbewegungsmelders ist in einem spritzwassergeschützten Gehäuse (IP 65) untergebracht. Bei externer Spannungsversorgung wird die Anschlussleitung über eine wasserdichte Verschraubung (M 16) in das Gehäuseinnere geführt. Bei der externen Spannungsversorgung ist folgender Hinweis noch zu beachten: Zur Gewährleistung der elektrischen Sicherheit muss es sich bei der speisenden Quelle um eine Sicherheits-Schutzkleinspannung handeln. Außerdem ist eine Quelle begrenzter Leistung erforderlich, die nicht mehr als 15 W liefern kann.
Schaltung
Die Schaltung des FS20 RBM ist in Abbildung 1 dargestellt und trotz der innovativen Technik recht einfach.
Hohe
Anforderungen bestehen hingegen beim Schaltungslayout und bei der
Bauteilpositionierung, da der empfindliche Sensor nur Ausgangsspannungen
im μV-Bereich liefert und dadurch eine sehr hohe Verstärkung zwischen
dem Sensorausgang und dem A/D-Wandler-Eingang des Mikrocontrollers
erforderlich ist. Um Störeinflüsse auf den Sensor zu vermeiden, sind
eine ganze Reihe an Schaltungsmaßnahmen erforderlich. Der eigentliche
Radarsensor des Typs IPM-365 ist links im Schaltbild zu sehen und hat
nur 3 Anschlüsse, bestehend aus Schaltungsmasse, Versorgungsspannung und
dem Dopplersignal- Ausgang. An die Versorgungsspannung des Sensors
werden besonders hohe Anforderungen gestellt, da es hier sehr leicht zu
Störeinkopplungen kommen kann. Der Sensor wird darum mit einem
getrennten Spannungsregler (IC 2) versorgt. Da der Sensor eine relativ
hohe Stromaufnahme (ca. 30 mA) hat, wird dieser nur im 2-Sekunden-Raster
während der 75 ms langen Messphase über T 1 mit Spannung versorgt. Der
FET-Transistor T 1 wird wiederum von Port PD 3 des Mikrocontrollers
gesteuert. Über die zur hochfrequenten Störunterdrückung dienende Spule L
3 gelangt die Spannung dann zum Sensor. Die Kondensatoren C 1 sowie C 3
bis C 6 und C 9 bis C 14 verhindern die bereits erwähnten
hochfrequenten Störeinkopplungen auf den Spannungseingang des
Radarsensors. Schwingneigungen am Ausgang des Spannungsreglers werden
mit Hilfe des Elkos C 2 verhindert.
Das
im μV-Bereich liegende Dopplersignal des Sensors gelangt auf Pin 2 des
CMOS-Schalters IC 3. Nur während der 75 ms langen Messphase sind Pin 2
und Pin 1 des CMOS-Schalters IC 3 verbunden. Das Signal gelangt danach
über C 19 gleichspannungsmäßig entkoppelt auf den nicht-invertierenden
Eingang der ersten mit IC 1 A aufgebauten Verstärkerstufe. Über R 7
liegt der Arbeitspunkt des Verstärkers auf der mit dem Spannungsteiler R
3, R 9 vorgegebenen Spannung, während C 26 und C 27 zur Pufferung und
zur Störunterdrückung dienen. Am Sensorausgang verhindern C 20, C 21
hochfrequente Störeinkopplungen auf den Verstärker. Das Verhältnis der
Widerstände R 4 im Rückkopplungszweig und R 6 bestimmt die
Wechselspannungsverstärkung dieser Stufe (ca. 40 dB). Aufgrund des
Kondensators C 25 erfolgt keine Gleichspannungsverstärkung. Gleichzeitig
legt dieser Kondensator die untere Grenzfrequenz der ersten Stufe fest.
C 15 begrenzt die obere Grenzfrequenz und dient gleichzeitig zur
Schwingneigungsunterdrückung der ersten Verstärkerstufe. Das
Ausgangssignal von IC 1 A wird direkt auf den nicht-invertierenden
Eingang eines weiteren mit IC 1 B aufgebauten Verstärkers gekoppelt. Die
Verstärkung dieser Stufe beträgt ebenfalls 40 dB und wird durch das
Verhältnis der Widerstände R 5 zu R 8 bestimmt. Hier bewirkt C 28 eine
gleichspannungsmäßige Entkopplung des Rückkopplungszweigs und C 16 dient
zur Begrenzung der oberen Grenzfrequenz. Das Ausgangssignal der zweiten
Verstärkerstufe (IC 1 B) wird über R 10 auf den A/D-Wandler-Eingang des
Mikrocontrollers (PC 0) gegeben.
Auf
den zweiten A/D-Wandler-Eingang des Mikrocontrollers (PC 1) gelangt die
Arbeitspunktspannung des Verstärkers als Referenz. Der Controller
vergleicht die Ausgangsspannung des Verstärkers mit der Referenzspannung
und sendet einen FS20-Befehl, wenn die Differenz einen vorgegebenen
Wert überschreitet. Die Kondensatoren C 29 und C 30 verhindern
Störeinkopplungen an den A/D-Wandler-Eingängen. Mit den Tasten TA 1 bis
TA 4 erfolgt die FS20-Konfiguration und Programmierung am Gerät. Da
diese Ports über interne Pull-ups verfügen, ist hier keine weitere
Beschaltung erforderlich. Die Kontroll-LED D 1 wird über R 12 zur
Strombegrenzung von Port PB 0 gesteuert. Das im 868-MHz-ISM-Band
arbeitende HF-Sendemodul wird direkt von Port PD 6 des Mikrocontrollers
gesteuert.
 |
| Bild 2: Spannungsversorgung des FS20 RBM |
Nachbau
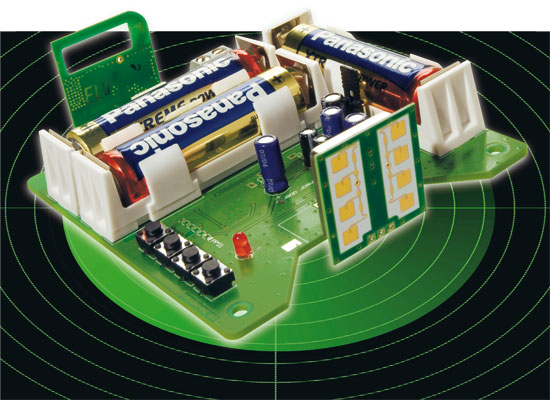
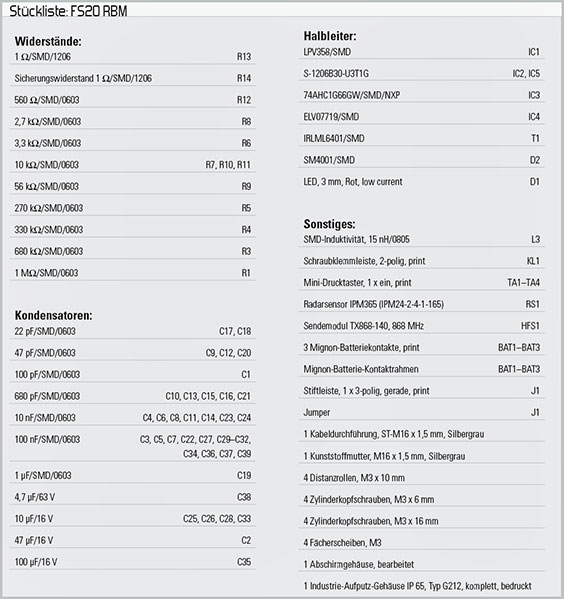
Der praktische Aufbau des FS20-Radarbewegungsmelders FS20 RBM ist recht schnell erledigt, da alle SMD-Komponenten werkseitig vorbestückt sind. Von Hand zu verarbeiten sind daher nur noch wenige Bauteile in konventioneller bedrahteter Bauform. Wir beginnen dabei mit den 4 Miniaturtastern, die vor dem Verlöten plan auf der Platinenoberfläche aufliegen müssen. Bei der danach einzulötenden Kontroll-LED D 1 ist der Anodenanschluss (+) durch ein längeres Anschlussbeinchen gekennzeichnet. Im nächsten Arbeitsschritt wird die 3-polige Stiftleiste J 1 eingelötet und direkt mit dem zugehörigen Kodierstecker bestückt.Beim
Einlöten der Schraubklemme KL 1 ist darauf zu achten, dass das Bauteil
vor dem Festsetzen mit ausreichend Lötzinn plan auf der
Platinenoberfläche aufliegen muss. Im nächsten Arbeitsschritt sind die
Elektrolytkondensatoren an der Reihe, wobei unbedingt auf die korrekte
Polarität zu achten ist. Vorsicht! Falsch gepolte Elkos können
explodieren oder auslaufen. Die 3 Kunststoff-Batteriehalter sind so auf
die Platine zu setzen, dass jeweils das Batteriesymbol mit der
Polaritätskennzeichnung im mittleren Bereich zu erkennen ist. Nach dem
Einrasten der Batteriehalter in die dafür vorgesehenen Schlitze der
Leiterplatte werden die Kontakte bestückt. Es ist sinnvoll, jeweils vor
dem Verlöten an der SMD-Seite eine Batterie zur Fixierung einzusetzen.
Beim Lötvorgang ist eine ausreichend große Lötspitze zu verwenden.

 |
| Bild 3: Seitlich angelötetes HF-Sendemodul |
")
 |
| Bild 5: Radarerfassung durch den Gehäusedeckel |
Achtung!
Beim Radarmodul handelt es sich um ein ESD-empfindliches Bauelement,
das durch statische Aufladung leicht gefährdet wird. Bei allen Arbeiten
mit einem nicht eingelöteten Radarmodul ist darauf zu achten, dass die
daran arbeitenden Personen nebst Hilfsmitteln nach ESD-Vorschriften
geschützt sind. Dies beginnt bereits beim Herausnehmen des Moduls aus
der Verpackung, wobei es am sichersten ist, das Modul lediglich seitlich
an der Platine zu greifen, jedoch nie die drei Anschlüsse der
Stiftleiste zu berühren.
Ist
das Modul erst einmal in die Schaltung eingelötet, besteht nahezu keine
Gefahr mehr, den Sensor zu zerstören. Nach dem Einlöten des Radarmoduls
ist die Platine bereits vollständig bestückt und kann in das dafür
vorgesehene Gehäuse eingebaut werden. Der Gehäuseeinbau ist abhängig von
der Montageposition des Sensors. Bei der Objekterfassung durch den
Gehäuse deckel oder bei seitlicher Erfassung wird die Platine direkt in
das Gehäuseunterteil gesetzt und mit vier Schrauben M3 x 6 mm fest
verschraubt. Unter jedem Schraubenkopf ist eine M3-Fächerscheibe
unterzulegen. Bei der Objekterfassung durch den Gehäuseboden
(Radarsensor ist an der Platinenunterseite, SMD-Seite, montiert)
benötigt die Platine einen zusätzlichen Abstand von 10 mm zum
Gehäuseboden. In diesem Fall werden zwischen der Platine und den
Schraubdomen im Gehäuseunterteil vier Abstandsröllchen von 10 mm Länge
gesetzt. Die Leiterplattenbefestigung erfolgt dann mit Schrauben M3 x 16
mm, wobei auch hier unter jedem Schraubenkopf eine M3-Zahnscheibe
erforderlich ist.
Schnell-Inbetriebnahme mit Werkseinstellungen
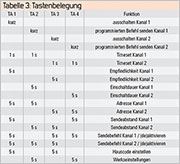
Nach dem Anlegen der Betriebsspannung muss das System (insbesondere die Verstärkerstufen) einschwingen. Daher bleibt für die ersten 5 Minuten nach Anlegen der Betriebsspannung die Radarerfassung deaktiviert. Der FS20 RBM ist mit den Werkseinstellungen 5 Minuten nach Anlegen der Betriebsspannung betriebsbereit. Den Empfängern sind lediglich nach den FS20-Konventionen der Hauscode (zufällig) und die Adresse (Kanal 1: 11 11; Kanal 2: 11 12) zu übermitteln. Dazu ist der jeweilige Empfänger entsprechend seiner Bedienungsanleitung in den Programmier-Modus zu versetzen und erst danach ist die Betriebsspannung an den FS20 RBM anzulegen. Innerhalb der ersten 5 Minuten sind für Kanal 1 Taste 1 oder 2 und für Kanal 2 Taste 3 oder 4 am FS20 RBM zu drücken. Sobald die Status-LED am Empfänger verlischt, hat dieser die Codierung empfangen. Nun kann man die Schaltfunktionen durch kurzes Drücken der Tasten 2 oder 1 (Kanal 1 Ein/Aus) bzw. der Tasten 4 oder 3 (Kanal 2 Ein/Aus) testen.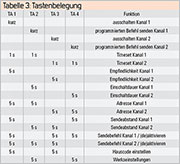
 |
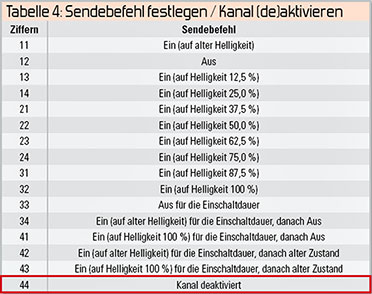
Sendebefehl festlegen/Kanal aktivieren, deaktivieren
 |
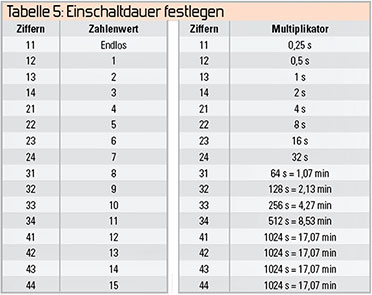
Einschaltdauer festlegen
 |
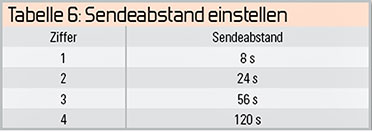
Sendeabstand
 |
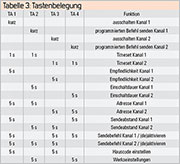 |
Timeset
Soll der vom FS20 RBM angesteuerte Empfänger auch von anderen Sendern (z. B. Handfernbedienungen des FS20-Funk- Schaltsystems) unter Nutzung des internen Timers bedient werden, so ist der interne Timer des Empfängers wie folgend beschrieben zu programmieren: Das Tastenpaar des Kanals, der dem zu programmierenden Empfänger zugeordnet ist, wird für mindestens 1 Sek. (kürzer als 5 Sek.) gleichzeitig gedrückt. Hierüber wird die Timerzeit- Messung zunächst gestartet und nach Ablauf der gewünschten Zeit auch wieder beendet. Während der Zeitmessung blinkt die LED des Empfängers. Für die eigentliche Programmierung der Timer gelten die Hinweise in den jeweils zugehörigen Bedienungsanleitungen der Empfänger. Die programmierbare Einschaltdauer der Sendebefehle 33 bis 43 hat Vorrang vor der internen Timereinstellung des Empfängers. Um mit dem FS20 RBM die interne Timerzeit des Empfängers zu nutzen, ist ein Sendebefehl zwischen 11 und 32 zu wählen.Adressen und Hauscodes einstellen
 |
 |
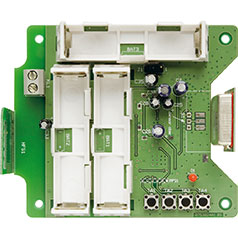
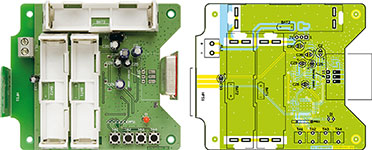
| Ansicht der fertig bestückten Platine des FS20 RBM mit zugehörigem Bestückungsplan, oben von der Oberseite, unten von der SMD-Seite ohne Abschirmhaube über IC 1 |
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen: als Online-Version
als Online-Version als PDF (8 Seiten)
als PDF (8 Seiten)Sie erhalten folgende Artikel:
- FS20-Radarbewegungsmelder FS20 RBM
- 1 x Journalbericht
- 1 x Schaltplan
| Foren |
Hinterlassen Sie einen Kommentar:


