 Videos
Videos
- Foren
- Technik-News
- Wissen
- FAQ-Datenbank
- Batterien, Akkus, Ladegeräte
- Bausätze, Lernpakete, Literatur
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic Components
- Hausautomation - Smart Home
- Haustechnik
- Kfz-Elektronik
- Klima-Wetter-Umwelt
- Messtechnik
- Modellsport, Freizeit
- Multimedia-SAT-TV
- Netzgeräte, Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkstatt, Labor
- Ratgeber
- Batterien - Akkus - Ladegeräte
- Bausätze
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic-Components
- Freizeit- und Outdoortechnik
- Hausautomations-Systeme
- Haustechnik
- Kfz-Technik
- Klima - Wetter - Umwelt
- Messtechnik
- Multimedia - Sat - TV
- Netzgeräte - Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkzeug - Löttechnik
- Elektronikwissen
- So funktioniert´s
- Praxiswissen
- FAQ-Datenbank
- Fachbeiträge
- ELVintern
- Experten testen
- Praxiswissen
- So funktioniert´s
- Hausautomation - Smart Home
- Haustechnik
- Beleuchtung
- Sicherheitstechnik
- Klima - Wetter - Umwelt
- Computer/Netzwerk
- Multimedia - Sat - TV
- Telefon - Kommunikation
- Kfz-Technik
- Stromversorgung
- HomeMatic-Know-how
- Freizeit- und Outdoortechnik
- Werkzeug - Löttechnik
- Messtechnik
- Fachmagazin & Abo
Artikel: 0 Summe: 0,00 EUR
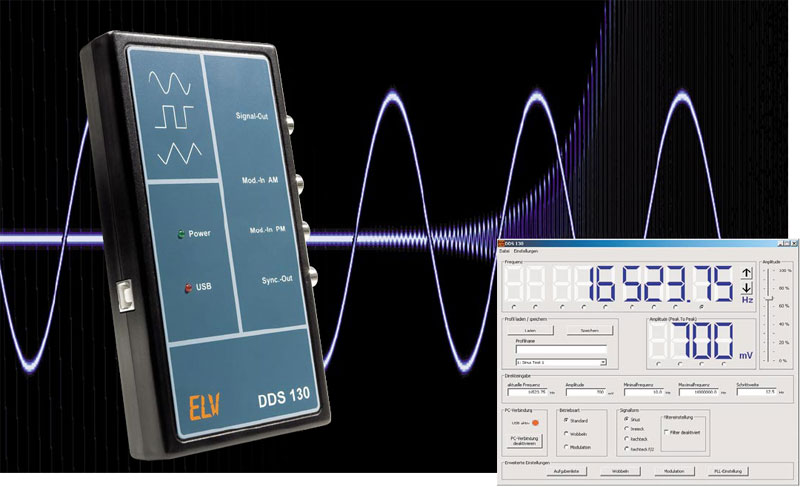
30-MHz-DDS-Funktionsgenerator DDS 130 Teil 1/2


Aus ELVjournal 06/2008
0 Kommentare


Bausatzinformationen
 |  |  |  |
| 2 | 1 | OK | 5/08 |
Technische Daten
| Frequenzbereich | Sinus: 0,25 Hz bis 30 MHz Dreieck: 0,25 Hz bis 1 MHz Rechteck: 0,25 Hz bis 25 MHz |
| Schrittweite | 0,25 Hz |
| Genauigkeit | 50 ppm, kalibrierbar |
| Signalform | Sinus, Dreieck, Rechteck |
| Signalausgang | 0 Vss bis ca. 1,1 Vss |
| Modulationsarten | FSK (Frequency Shift Keying), PSK (Phase Shift Keying), ASK (Amplitude Shift Keying), AM (Amplitude Modulation) |
| Frequenz-/Phasenhub | ±0,25 Hz bis ±30 MHz / 1° bis 359° |
| Modulationsfrequenz | 1 Hz bis 5 kHz |
| Modulationsquelle | intern, extern |
| Wobbelbereich | 0,25 Hz bis 30 MHz |
| Wobbelfrequenz | 0,1 Hz bis 20 Hz |
| PLL-Faktor | 1 bis 2048 |
| ZF-Korrektur | -2 GHz bis 2 GHz |
| Spannungsversorgung | USB-Bus-Powered 5 VDC / 300 mA |
| Abmessungen | 170 x 97 x 30 mm |
Der DDS 130 ist ein programmierbarer Funktionsgenerator, der nach dem DDS-Prinzip (direct digital synthesis) arbeitet, bei dem ein Sinussignal digital generiert wird. Neben dem so erzeugten Sinussignal kann der DDS 130 aber auch ein Dreieck- und ein Rechtecksignal liefern. Die gesamte Bedienung des DDS 130 erfolgt via USB über eine PC-Software. Die Ausgangsfrequenz des DDS 130 lässt sich im Bereich von 0,25 Hz bis 30 MHz in 0,25-Hz-Schritten einstellen, auch eine Einstellung der Amplitude ist mit der PC-Software möglich. Schließlich stellt der DDS 130 auch eine Wobbel- und Modulationsfunktion zur Verfügung und ermöglicht automatisierte Signalausgaben.
Vielseitig bis 30 MHz
Mit
neuen Bereichsgrenzen, feiner Schrittweite und nochmals verbessertem
Schaltungskonzept fügt sich der DDS 130 in die erfolgreiche Reihe der
DDS-Funktionsgeneratoren von ELV ein. Der Funktionsgenerator wird
komplett per PC ferngesteuert und fügt sich so sowohl in
PC-Labortechnik-Umgebungen als auch in softwarebasierte
PLL-Empfangssysteme ein. Denn neben dem Einsatz als Funktionsgenerator
mit extrem hoher Genauigkeit und Stabilität ist auch eine Verwendung als
PLL-Frequenzaufbereitung in digitalen Empfängerkonzepten möglich. Dafür
ist die bedienelemente- und displaylose Ausführung der Hardware
geradezu prädestiniert, lässt sich die Platine doch sehr leicht in
eigene Empfängerkonzepte eingliedern, zumal in sogenannte SDRs,
softwaredefinierte Empfänger mit Frontend auf dem PC-Bildschirm. Die im
Lieferumfang des DDS 130 befindliche Software verfügt über zahlreiche
Optionen, die die Leistungsfähigkeit des Funktionsgenerators aufzeigen:
– Frequenz-Direkteingabe inklusive Bereichsgrenzen- und Schrittweite-Definition
– Signalamplituden-Direkteingabe
– Signalform-Auswahl
– mehrere Betriebsarten:
Standard: kontinuierliche Ausgabe der eingestellten Frequenz und Amplitude
Wobbeln:
Start-/Stopp- und Wobbelfrequenz einstellbar; bei Start jedes
Wobbelvorgangs wird am Ausgang „Sync.-Out“ ein kurzer High-Impuls
ausgegeben.
Modulation: 3 digitale Modulationsarten
(FSK, PSK, ASK), interne Modulationsfrequenz einstellbar; externe
Modulation möglich; AM über externe Modulation
– PLL-Einstellung mit Teilungsfaktor und Offset möglich
– Alle Einstellungen sind speicherbar und nach Bedarf abrufbar.
– Über eine Aufgabenliste sind verschiedene Signalabläufe automatisiert abrufbar.
Widmen wir uns zunächst der interessanten Schaltungstechnik des DDS 130.

Zur
Versorgung des DDS-Boards werden zwei stabilisierte Spannungen von +5 V
und -5 V benötigt. Aus der Spannung +UB, die vom PC über die USB-Buchse
bereitgestellt wird, entsteht durch Siebung und Glättung mithilfe der
Kondensatoren C 56 bis C 60 und der Spule L 7 die stabilisierte Spannung
von +5 V. Sobald das DDS-Board an der USBBuchse angeschlossen wird,
leuchtet die grüne „Power“-LED D 17 auf. Der in Reihe geschaltete
Widerstand R 40 wird zur Strombegrenzung benötigt. Die Sicherung SI 1
(siehe Abbildung 2) sorgt dafür, dass im Fehlerfall die PC-Hardware
geschützt bleibt. Die -5 V werden mit der Spannungs-Inverter- Schaltung,
bestehend aus dem DC-DC-Wandler IC 8 und den Kondensatoren C 65, C 66,
den Widerständen R 39, R 41 bis R 43, der Spule L 9 und der Diode D 16
erzeugt. Auch hier dienen die Kondensatoren C 61 bis C 64 und die Spule L
8 zur Siebung und Glättung der Spannung.

Herzstück
ist der eingesetzte DDS-Schaltkreis IC 5 vom Typ AD9834. Dieser
DDS-Chip der Firma Analog Devices benötigt zum Betrieb nur wenige
externe Bauteile. Dabei stellt der an Pin 8 angeschlossene
Quarz-Oszillator Q 2 die wohl wichtigste Komponente dar, da hier der
Mastertakt zur Verfügung gestellt wird. Der Quarz-Oszillator wurde
bewusst mit einer Frequenz von 67,109 MHz gewählt, da sich mit dieser
Grundfrequenz eine genaue Schrittweite von 0,25 Hz realisieren lässt.
Das Taktsignal von Q 2 wird über das nachgeschaltete Filter aus R 35 und
C 55 an den Takteingang des DDS-Chips gelegt. Um die Störungen, die der
Quarz-Oszillator in der Versorgungsspannung erzeugt, zu minimieren,
wurde mit der Spule L 6 eine Entkopplung zur +5 V Betriebsspannung
realisiert. Zusätzlich sind die Kondensatoren C 44 bis C 47 zur Blockung
und Stabilisierung eingesetzt. Über die Pins 9 bis 11 und 13 bis 15 ist
der DDS-Chip mit dem Mikrocontroller IC 1 verbunden, der die komplette
Steuerung realisiert. Über die beiden Signalausgänge „IOUT“ (Pin 19)
bzw. „IOUTB“ (Pin 20) und die 120-Ohm-Widerstände R 24 und R 29 wird das
vom Mikrocontroller eingestellte Ausgangssignal zur Verfügung gestellt,
wobei hier nur der Sig nalausgang „IOUT“ für die weitere Verarbeitung
auf den CMOS-Umschalter IC 9 geführt wird. Die eingesetzten
CMOS-Umschalter IC 9 und IC 10 zeichnen sich durch ihre sehr kleine
Bauform und ihren geringen Durchlasswiderstand bei einer Bandbreite von
über 200 MHz aus. Zudem lassen sich die Umschalter bequem über die
Signalleitungen „Filter“ und „Square“ am Mikrocontroller IC 1 schalten.
So kann das Ausgangssignal „IOUT“ entweder direkt von Pin 7 nach Pin 9
am IC 9 geführt werden, oder es wird über Pin 4 an eine Filterschaltung
angeschlossen. Das Chebyshev-Filter, welches aus den Bauteilen L 2 bis L
5 und C 40 bis C 43 aufgebaut ist, besitzt eine Grenzfrequenz von ca.
34 MHz und sorgt für eine Filterung von „ungewollten“ Signalanteilen aus
dem Ausgangssignal. Da es sich beim DDS-Verfahren im Prinzip um eine
digitale Signalerzeugung mittels Digital-Analog-Wandlung handelt, ist
das Ausgangssignal beispielsweise mit entsprechenden „Rückständen“ des
Taktsignals verunreinigt. Jedoch wird das Filter nur bei der Erzeugung
eines Sinussignals benötigt, bei den Signalformen Dreieck und Rechteck
würde das Filter zu erheblichen Signalverzerrungen führen. Aus diesem
Grund wird das Filter bei diesen Signalformen mithilfe des
CMOS-Umschalters IC 9 überbrückt.
Mit
dem DDS 130 lassen sich auch einfach Rechtecksignale erzeugen, die als
Taktquelle in elektronischen Schaltungen einsetzbar sind. Dabei werden
zwei verschiedene Methoden zur Erzeugung angewendet. Rechtecksignale mit
einer Frequenz unterhalb von 3 MHz erzeugt der DDS-Chip direkt. Dabei
wird das höchstwertige Bit eines internen Registers verwendet, welches
am Pin 16 (Sig Bit Out) ausgegeben und mithilfe des Schmitt-Triggers IC
11 und den beiden Widerständen R 32 und R 36 auf einen definierten Pegel
gebracht wird. Durch Anlegen eines Low-Pegels an der Signalleitung
„Square“ werden die Umschalter des IC 10 so geschaltet, dass eine
Weiterleitung des Rechtecksignals von Pin 10 nach Pin 9 erfolgt. Bei
Frequenzen oberhalb von 3 MHz beginnt das Rechtecksignal zu jittern. Aus
diesem Grund wird das weiterhin generierte Sinussignal über den Pin 7
von IC 10 an den Komparatoreingang „VIN“ des AD9834 geführt. Dieses
Sinussignal wird für die zweite Methode zur Erzeugung von
Rechtecksignalen benötigt. Der AD9834 detektiert die Nulldurchgänge des
Sinussignals und setzt dementsprechend den Pin 16 (Sig Bit Out) auf
High- bzw. Low-Pegel. Auch dieses Signal wird mit dem Schmitt-Trigger
und den beiden Widerständen auf einen definierten Pegel gebracht. Die
Umschaltung zwischen den beiden Methoden erfolgt automatisch durch den
Mikrocontroller IC 1. An dieser Stelle stellt sich die Frage, warum
nicht generell die zweite Methode für die Erzeugung von Rechtecksignalen
genutzt wird? Der Grund ist der interne Komparator. Dieser benötigt zur
Bildung eines Referenzpotentials für die Nulldurchgangserkennung, ein
Eingangssignal mit mindestens 3 MHz. Das nun an Pin 9 von IC 10
anliegende Rechtecksignal wird auf die Diode D 15 geführt. Diese Diode
schützt den Eingang (Pin 3) der Endstufe vom Typ LMH6503MA vor
Spannungen, die mehr als 720 mV betragen. Mit der im Eingangsbereich
liegenden Lötbrücke JP 1 kann ausgewählt werden, ob das ankommende
Signal mit einem DC-Offset versehen sein oder als reines AC-Signal
anliegen soll. Wird diese Brücke geschlossen, hat das Ausgangssignal
zwar einen DC-Offset, jedoch kann nun der gesamte Frequenzbereich bis
hinunter zu 0,25 Hz genutzt werden. Im geöffneten Zustand wird das
Ausgangssignal über C 39 kapazitiv entkoppelt. Der DC-Anteil des Signals
wird dadurch eliminiert, allerdings ist nun eine untere Grenzfrequenz
von 8 Hz vorhanden, d. h. dass Signale mit einer Frequenz von unter 8 Hz
entsprechend gedämpft werden. Der Verstärkungsfaktor der Endstufe IC 6
lässt sich mittels einer am Pin 2 angelegten Spannung steuern. An den
Pins 1 und 14 der Endstufe IC 6 ist die positive Betriebsspannung +5 V
und an den Pins 7 und 8 die negative Betriebsspannung -5 V angelegt. Die
Kondensatoren C 24 bis C 27 und C 48 bis C 51 sind wieder als
Staffelblockung aus verschiedenen Kapazitätswerten beschaltet. Mit den
beiden Widerstandstrimmern R 16 und R 33 und den Spannungsteilern R 17, R
18 bzw. R 34, R 38 kann an der Endstufe LMH6503MA ein Offsetabgleich
durchgeführt werden. Auf diesen Abgleich wird noch im Abschnitt
„Inbetriebnahme und Kalibrierung“ näher eingegangen. Um eine definierte
Ausgangsimpedanz von 50 Ω zu erhalten, sind zwischen dem Ausgang von IC 6
(Pin 10) und der Buchse BU 5 die beiden 100-Ω-Widerstände R 22 und R 30
parallel eingesetzt.
Kommen
wir nun zum Mikrocontroller IC 1. Dieser wird mit einem
16-MHz-Keramikschwinger als Taktgeber betrieben. Um eventuelle
Stör-Einstreuungen in die Versorgungsspannung zu eliminieren, wurde
neben den Kondensatoren C 19 bis C 22 die Spule L 1 zur Blockung
eingesetzt. Neben der Steuerung des DDS-Chips übernimmt der Controller
auch die Steuerung des Digital-Analog-Wandlers vom Typ LTC1658 mittels
der drei Datenleitungen an Pin 14 bis Pin 16. Dieser DA-Wandler besitzt
eine Auflösung von 14 Bit und erhält am Pin 6 (REF) eine
Referenzspannung von 2,5 V. Diese Referenzspannung wird mit der
Spannungsreferenzdiode D 14 erzeugt. Je nach Einstellung durch den
Mikrocontroller steht nun am Ausgang „Vout“ des DA-Wandlers eine
Spannung zwischen 0 und 2,5 V zur Verfügung. Mithilfe des aus den
Widerständen R 10, R 11 und R 13 bestehenden Spannungsteilers kann am
Knotenpunkt zwischen den Widerständen R 10 und R 11 eine Spannung von -1
V bis +1 V erzeugt werden. Diese Spannung gelangt auf den Eingang (Pin
6) des Operationsverstärkers vom Typ TLC277C, der als summierender
Inverter arbeitet. Hinter der BNC-Buchse „Mod.-In AM“ befindet sich ein
zweiter Operationsverstärker, der als reiner Impedanzwandler arbeitet.
An seinem Eingang ist der Kondensator C 1 eingesetzt, über den der
DC-Anteil des eingespeisten Modulationssignals eliminiert wird. Ist die
Buchse nicht mit einem Signal belegt, wird der Eingang des OPs über den
Widerstand R 4 definiert auf Masse gezogen. Das Ausgangssignal am Pin 1
des Operationsverstärkers gelangt über den Widerstand R 2 ebenfalls auf
den Pin 6 des ersten OPs und summiert sich auf. Das invertierte Signal
der aufsummierten Spannungen (Pin 7) wird über den Widerstand R 9 auf
den Eingang „VG“ (Pin 2) der Endstufe LMH6503MA gelegt. Dieses Signal
wird wie schon erwähnt, genutzt, um den Verstärkungsfaktor der Endstufe
zu ändern. Am Portpin PC 6 von IC 1 befindet sich der externe
Modulationseingang „Mod.-In PM“. Der Synchronisationsausgang „Sync.-Out“
für die Betriebsart „Wobbeln“ wird durch den Portpin PC 5 angesteuert.
Für die Kommunikation zwischen dem Mikrocontroller und dem
angeschlossenen PC wird ein USB-UART-Wandler (IC 4) eingesetzt. Dieser
Chip stellt die über den UART des Mikrocontrollers ankommenden Daten dem
USB zur Verfügung und umgekehrt. Da der Wandler intern mit einer
Spannung von 3,3 Volt arbeitet, sind am Datenausgang „TxD“ zwei Schmitt-
Trigger von Typ 74HCT14 in Reihe angeschlossen. Sie sorgen für eine
Anhebung des Signalpegels auf 5 V. Die Kondensatoren C 4 bis C 6 sind
zur Entstörung und Stabilisierung eingesetzt, als Reset-Schaltung wird
hier nur der Widerstand R 1 benötigt. Sobald eine Datenverbindung
besteht, wird die rote „USB“-LED D 13 eingeschaltet. So weit zur
Schaltungsbeschreibung des DDS 130. Im zweiten Teil kommen wir zu
Nachbau, Kalibrierung, Inbetriebnahme und der Softwarebeschreibung
dieses interessanten Funk tionsgenerators.
Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen: als Online-Version
als Online-Version als PDF (4 Seiten)
als PDF (4 Seiten)Sie erhalten folgende Artikel:
- 30-MHz-DDS-Funktionsgenerator DDS 130 Teil 1/2
- 1 x Journalbericht
- 1 x Schaltplan
| Produkte | weitere Fachbeiträge | Foren |


Hinterlassen Sie einen Kommentar:


