 Videos
Videos
- Foren
- Technik-News
- Wissen
- FAQ-Datenbank
- Batterien, Akkus, Ladegeräte
- Bausätze, Lernpakete, Literatur
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic Components
- Hausautomation - Smart Home
- Haustechnik
- Kfz-Elektronik
- Klima-Wetter-Umwelt
- Messtechnik
- Modellsport, Freizeit
- Multimedia-SAT-TV
- Netzgeräte, Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkstatt, Labor
- Ratgeber
- Batterien - Akkus - Ladegeräte
- Bausätze
- Beleuchtung
- Computer-/Netzwerktechnik
- Electronic-Components
- Freizeit- und Outdoortechnik
- Hausautomations-Systeme
- Haustechnik
- Kfz-Technik
- Klima - Wetter - Umwelt
- Messtechnik
- Multimedia - Sat - TV
- Netzgeräte - Wechselrichter
- Sicherheitstechnik
- Telefon-/Kommunikationstechnik
- Werkzeug - Löttechnik
- Elektronikwissen
- So funktioniert´s
- Praxiswissen
- FAQ-Datenbank
- Fachbeiträge
- ELVintern
- Experten testen
- Praxiswissen
- So funktioniert´s
- Hausautomation - Smart Home
- Haustechnik
- Beleuchtung
- Sicherheitstechnik
- Klima - Wetter - Umwelt
- Computer/Netzwerk
- Multimedia - Sat - TV
- Telefon - Kommunikation
- Kfz-Technik
- Stromversorgung
- HomeMatic-Know-how
- Freizeit- und Outdoortechnik
- Werkzeug - Löttechnik
- Messtechnik
- Fachmagazin & Abo
Artikel: 0 Summe: 0,00 EUR
PC-USB-I2C-Interface


Aus ELVjournal 06/2008
0 Kommentare


Bausatzinformationen
 |  |  |  |
| 1 | 0,5 | OK | 6/08 |
Inhalt des Fachbeitrags
Technische Daten
| Schnittstellen | 3 x I²C-Bus (TWI-Bus) inkl. 5-V-Versorgung |
| Mögliche Bus-Taktfrequenzen | 245 Hz – 400 kHz (Standard-Speed: 100 kHz, Fast-Speed: 400 kHz) |
| Versorgung von I²C-Komponenten | 5 V/max. 450 mA |
| Eigene/gesamte Stromaufnahme | <50 mA/max. 500 mA (High Power USB) |
| Anschließbare Komponenten | bis zu 128 Geräte, ICs oder Sensoren |
| Anzeigeelement | LED für I²C-Bus-Aktivität |
| PC-Anbindung | USB (Kommunikation über virtuellen COM-Port) |
| Firmware-Update | über USB möglich |
| USB-Treiber für | Windows 2000/XP/Vista, Linux, Mac-OS X |
| Mitgeliefertes Zubehör | USB-Kabel, 3 Anschlusskabel |
| Abmessung Gehäuse (B x H x T) | 39 x 14 x 50 mm |
Einfach und schnell messen, steuern, testen und programmieren – mit einem einfa chen Bussystem wie dem I²C-Bus ist dies kein Problem, und die große Vielfalt I²C-kompatibler Bausteine, Prozessoren und Geräte macht zahlreiche Lösungen einfach. Mit unse rem kleinen Interface kann von einem PC aus via USB mit einfachsten Befehlen direkt auf angeschlossene Geräte oder Bausteine mit I²C-Schnittstelle zugegriffen werden. Durch die Makrofunktion ist das Interface z. B. mit nur einem zusätzlichen IC als Datenlogger für analoge/digitale Signale, Temperaturwerte usw. konfigurierbar.
Intelligente Chips an zwei Drähten
Der I²C-Bus genießt unter Elektronik-Entwicklern einen guten Ruf, ermöglicht er es doch als Standard-Industrie-Bus, dass Mikrocontroller und andere intelligente Komponenten, die über eine I²C-Schnittstelle verfügen, auf einfache und ökonomische Weise miteinander kommunizieren können. Eines der wohl typischsten Beispiele hierfür ist die Anbindung eines seriellen EEPROMs an einen Mikrocontroller per I²C-Bus. Ein großer (ökonomischer) Vorteil dieses Bustyps und seines Busprotokolls ist, dass ein steuernder Mikrocontroller lediglich zwei I/O-Leitungen benötigt, um eine große Anzahl von intelligenten I²C-Komponenten zu erreichen. Derartige Komponenten gibt es in großer Anzahl und Vielfalt, als da u. a. wären: die erwähnten EEPROMS, analoge Sensoren wie z. B. Temperatursensoren, A/D-D/A-Wandler, Echtzeituhren, I/O-Bausteine und LCD-/LED-Treiber. Natürlich liegt es nahe, solche Bausteine ob ihrer vielseitigen Einsatzmöglichkeiten auch an einen PC anzubinden, nur dem fehlt halt eine dem Anwender zugängliche I²C-Schnittstelle! Dieses Manko auszugleichen, ist die Aufgabe unseres kleinen Interfaces. Es setzt eine USB-Schnittstelle mittels eines USB-UART-Wandlers und eines kleinen Mikrocontrollers in eine I²C-Schnittstelle um und umgekehrt. Die bis zu 128 Geräte am I²C-Bus können nun über einen relativ einfachen Befehlsalgorithmus direkt mit dem PC kommunizieren. Auf diese Weise lassen sich sehr unkompliziert auch größere Mess-, Regel- und Steueraufgaben mit I²C-kompatiblen Komponenten aufbauen. Bevor wir jedoch zum Interface selbst und dessen Programmierung kommen, wollen wir zunächst die historischen und technischen Grundlagen des I²C-Bussystems betrachten.Weltstandard I²C
Bereits Anfang der 80er Jahre wurde nach einer einfach beherrschbaren Kommunikationslösung zwischen den immer komplexer werdenden Prozessoren und Peripheriebausteinen in der Radio-und Fernsehtechnik gesucht. Die Philips Semiconductors Division war zu dieser Zeit stark in diesem Markt vertreten und kreierte in den 80er Jahren den seriellen Datenbus I²C (Inter Integrated Circuit Bus) zur Steuerung von Komponenten der Heimelektronik. Seit der ersten Spezifizierung 1992 hat sich dieser Bus als Industriestandard durchgesetzt und dominiert Anwendungen wie die eingangs erwähnten. Vor allem aber ist der Bus das Rückgrat zahlreicher Heimelektronikgeräte, die auf Prozessorlösungen basieren, z. B. Fernsehgeräte, Sat-Receiver, Recorder, aber auch von Steuerlösungen der Haustechnik. Heute sind z. B. nahezu alle Empfangstuner in Fernsehgeräten, Autoradios, Receivern mit einer I²C-Schnittstelle ausgestattet, über die die Frequenzwahl von einem Prozessor aus erfolgt. Selbst in den verbreiteten kleinen 2,4-GHz-ISM-Videosendesystemen ist oft ein I²C-Bus zu finden, nämlich immer dann, wenn für die Auswahl der Kanäle statt eines statischen DIP-Schalters eine einzige Wahltaste benutzt wird. |
| Bild 1: Einsatzbeispiel des I2C-Busses in der Consumer-Elektronik |
Die Architektur
Zurück zur Technik. Der I²C-Bus ist ein synchroner, serieller Zweidraht-Bus, auf dem mindestens ein Master-Gerät und die adressierten Slave-Geräte mittels eines in Hard- und Software realisierten Protokolls miteinander kommunizieren. Dies erfolgt, je nach Bus-Spezifikation, mit einer maximalen Taktrate von 3,4 MHz, üblich sind auch die Taktraten 100 und 400 kHz. Vorgegeben wird die maximale Taktrate durch den langsamsten Baustein am Bus. Nach unten darf der Takt beliebig reduziert werden, solange der Master dazu in der Lage ist. Ebenso sind mehrere Master (Multimaster) zulässig, wenn diese einen solchen Betrieb unterstützen (mit dem USB-I2C nicht möglich). Die Buslänge darf bei einer maximalen Buskapazität von 400 pF (je Bus-Segment, über Expander erweiterbar) je nach Geschwindigkeit bis zu mehreren Metern betragen. Der Bus besteht aus zwei bidirektional genutzten Leitungen, der Taktleitung SCL (Serial Clock Line) und der Datenleitung SDA (Serial Data Line), die die beteiligten Geräte miteinander verbinden. Abbildung 2 zeigt eine typische I²C-Konfiguration.So funktioniert’s
Der als Master fungierende Baustein, z. B. der in den Abbildungen 1 und 2 gezeigte Mikrocontroller, ist für den defi- nierten Ablauf der Kommunikation zuständig, also Steuerung der Abläufe, Generierung des Taktsignals und Adressierung sowie Datenversand/-empfang.
Der
Slave empfängt Daten und bestätigt deren Empfang (Acknowledge).
Natürlich kann auf Anforderung (Master setzt das Read-Bit in der
Adressierung) auch der Slave Daten an den Master senden. Generell
ergeben sich daraus vier Betriebsarten am I²C-Bus:
- Senden durch den Master (Master-Transmit)
- Empfangen durch den Slave (Slave-Receive)
- Senden durch den Slave nach Aufforderung durch den Master (Slave-Transmit)
- Empfangen durch den Master (Master-Receive)
Zum
Verständnis des Kommunikationsablaufs sind die folgend beschriebenen
Buszustände bzw. Abläufe grundlegend. Die Logik-Pegel für die Zustände
„high“ und „low“ sind keine fest definierten Werte, sondern abhängig von
der Betriebsspannung des Systems, dabei wird „low“ mit <0,3 • VDD
und High mit >0,7 • VDD definiert.
 |
| Bild 3: Das grundlegende Zusammenspiel zwischen Daten- und Taktleitung |
 |
| Bild 4: Die Start-/Stopp-Bedingungen am I²C-Bus |
Eine komplette Datenübertragung (Abbildung 5) erfolgt byteweise und beginnt mit der Adresse des angesprochenen Slave-Gerätes.
 |
| Bild 5: Ein kompletter Datenübertragungszyklus, bei dem der Master vom Slave 1 Datenbyte anfordert und erhält. |
Das
höchstwertigste Bit eines Bytes wird dabei zuerst übertragen (MSB
first). Danach quittiert der Slave den Erhalt mit dem Acknowledge-Signal
(ACK), indem er, während das nächste Taktsignal vom Master kommt, die
SDA-Leitung auf „low“ zieht. Er signalisiert damit auch, dass er bereit
ist, ein weiteres Byte zu empfangen. Ist der Slave dazu nicht in der
Lage oder ist die übertragene Adresse fehlerhaft, so wird die Leitung
nicht auf „low“ gelegt und somit keine Bestätigung (Not Acknowledge =
NACK) versendet. Der Master kann nach der Datenübertragung entweder eine
Stopp-Bedingung zum Abschluss des Datentransfers generieren oder eine
sogenannte Repeated Start-Bedingung für einen neuen Datentransfer. Dies
ist nichts weiter als das Setzen einer erneuten Start-Bedingung ohne
vorangegangene Stopp-Bedingung. Damit wissen alle anderen Master am Bus,
dass dieser noch nicht für sie frei ist, sie müssen weiter auf das
Stopp-Signal warten. Für den Betrieb mehrerer Master am Bus und den
Betrieb unterschiedlich schneller Komponenten gibt es weitere
Bedingungen. Näheres hierüber findet der Interessierte unter [1]. Auch
unter [2] gibt es eine sehr gute Beschreibung.
Zum
Abschluss werfen wir noch einen Blick auf die angewandten
Adressierungsmöglichkeiten zur Ansprache der Komponenten. Man
unterscheidet hier zwischen der 7-Bit- Adressierung (diese erlaubt bis
zu 128 Komponenten am Bus) und der 10-Bit-Adressierung. Letztere ist bei
größerer Komponentenanzahl am Bus erforderlich, hiermit sind bis zu
1024 Komponenten am Bus betreibbar. Der Betrieb von Komponenten mit 7-
und 10-Bit-Adressierung ist gemischt möglich. Abbildung 6 zeigt den
Aufbau der 7-Bit-Adresse mit zwei Übertragungsbeispielen.

Am
10-Bit-Datentransfer-Beispiel in Abbildung 7 kann man erkennen, wie die
gemeinsame Existenz von 7- und 10-Bit- Geräten gesichert wird – durch
den fest reservierten Adressteil 11110xx (xx sind die ersten beiden Bits
der 10-Bit- Adresse) und des zugehörigen R/W-Bits. Erst nach der Slave-
Bestätigung (ACK) folgen die weiteren 8 Bit der 10-Bit- Adresse,
gefolgt von der nächsten Bestätigung durch die nun vollständig
angesprochene 10-Bit-Komponente. Detaillierte Ausführungen zur
Adressierung sind ebenfalls unter [1] und [2] nachzulesen.

 |
| Bild 8: Adressaufbau des LM75 und die Schaltung dazu |
Installation und Bedienung
Vor
dem Anschluss des USB-I2C-Interfaces ist der über einen Download auf
der ELV-Produktseite verfügbare Treiber wie im Folgenden beschrieben zu
installieren:
1. Silabs-VCP-Treiber (Virtual-COM-Port) installieren
2. USB-I2C-Interface über das beiliegende USB-Kabel an den PC anschließen (vorerst ohne angeschlossene I2C-Hardware)
3.
Das Interface wird vom Betriebssystem als neues Gerät erkannt, es
öffnet sich der Installationsassistent, dessen Anweisungen zu befolgen
sind.
4. Nun ist im Windows-Gerätemanager zu prüfen, welcher
COM-Port dem Gerät zugewiesen wurde. Dieser lässt sich im Gerätemanager
über: „Eigenschaften“-> „Erweitert...“ ändern, siehe dazu Abbildung
9.
5. Schließlich ist ein beliebiges Terminalprogramm (z. B. HTerm
oder Realterm, siehe [3] und [4]) zu starten, der zugewiesene COM-Port
auszuwählen und mit folgenden Einstellungen zu öffnen: 115.200 bit/s, 8
Datenbits, 1 Stoppbit, keine Parität, keine Flusssteuerung (Handshake)
6. Nun kann man eigene I²C-Slave-Geräte anschließen und die Kommunikation starten.
 |
| Bild 9: So erfolgt die Kontrolle und ggf. Änderung des zugewiesenen virtuellen COM-Ports unter Windows XP. |
Die Kommunikation mit den I2C-Geräten
Wie im I²C-Grundlagen-Teil bereits beschrieben, wird jeder Schreib-/Lesezugriff auf dem I²C-Bus durch eine Start-Bedingung eingeleitet. Dies geschieht beim USB-I2C-Interface durch das ASCII-Zeichen S. Wie in Tabelle 1 dargestellt, folgt danach die Adresse des angesprochenen Slave-Gerätes. Das Adressbyte wird um das Lese/Schreib-Bit ergänzt. Es folgen Daten und/oder weitere Konfigurationsbytes. Abgeschlossen wird die I²CKommunikation durch das mit dem Zeichen P ausgeführte Stopp-Ereignis.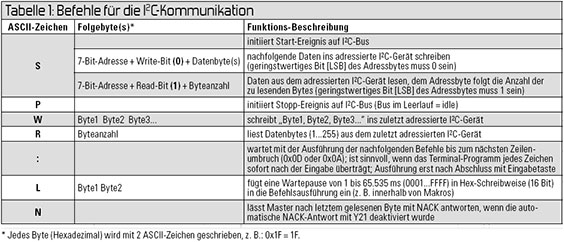
 |
| Bild 10: Verwendung des USB-I2C-Interface mit der Beispielschaltung aus Bild 11. |
 |
| Bild 11: Beispielschaltung für die Anbindung des A/D-D/A-Konverters PCF8591 an das USB-I2C-Interface |
Es
ergeben sich die Leseadresse 0x91 (10010001) und die Schreibadresse
0x90 (10010000). Zur Konfiguration des PCF8591 wird erst die
Schreibadresse 0x90 und danach das „Control-Byte“ 0x05 übertragen.
Dessen genaue Bedeutung kann im Datenblatt [5] nachgelesen werden.
Beispiel: A/D-Wandler mit PCF8591
Zum
Auslesen der vier A/D-Wandler-Kanäle ergeben sich damit die folgenden
Befehlszeichen, die nacheinander als ASCII-Symbole über das
Terminal-Programm an das USBI2C- Interface gesendet werden:
S90 05 R04 P
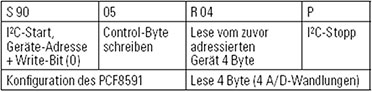
Der PCF8591 erhält diese Messanweisung, konvertiert die jeweils anliegende Spannung und gibt diese zurück an das USB-I2C-Interface, das die Messwerte zum PC weiterreicht.
Die Antwort besteht z. B. aus den folgenden ASCII-Zeichen:
A2 EA F5 FF

Sehr
schön ergänzen lassen sich diese nicht gerade selbsterklärenden
Rückgabewerte durch die in Tabelle 2 aufgelisteten Kommentar-Funktionen.
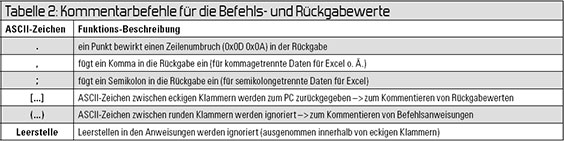
Um Kommentare auch zwischen die 4 Datenwerte aus dem vorherigen Beispiel einfügen zu können, muss die Leseroutine in 4 Teilschritte aufgeteilt werden. Das kann z. B. folgendermaßen aussehen: S90 05 [Wert 0:]R01,. [Wert 1:]R01,. [Wert 2:]R01,. [Wert 3:]R01;P
Die besser verständliche Rückgabe sieht in diesen Fall folgendermaßen aus:
Wert 0: A2,
Wert 1: EA,
Wert 2: F5,
Wert 3: FF;
Beispiel: D/A-Wandler mit PCF8591
Soll
mit der vorgestellten Beispielschaltung eine analoge Spannung auf den
D/A-Wandler-Ausgang (AOUT) ausgegeben werden, ist eine
I²C-Schreibroutine notwendig. Möchte man beispielsweise die halbe
Referenzspannung (Vref/2 = 2,5 V) ausgeben, ergibt sich die folgende
Befehlsfolge:
S90 45 7E P
Die Bedeutung der Befehle:

Dabei
gibt das USB-I2C-Interface keine Rückmeldung an den PC. Da aber in der
Beispielschaltung in Bild 11 die Ausgangsspannung von AOUT gleichzeitig
am A/D-Wandler-Eingang AIN0 anliegt, kann sie dort mit der zuvor
beschriebenen Mess-Befehlsfolge überprüft werden.
Beispiel Datenlogger mit PCF8591
Ergänzt
man die zum Messen geeignete A/D-Wandler-Befehlsfolge um ein paar
Befehle und speichert man diese im Makrospeicher des USB-I2C, so wird
aus der Kombination USB-I2C-Interface plus PCF8591 ein kompletter
analoger Datenlogger, der selbstständig alle 512 ms die Spannungen an
den vier A/D-Wandler-Eingängen ermittelt und zum PC überträgt. Wird das
Gerät vom USB-Port getrennt und später neu verbunden, so nimmt der
Datenlogger selbstständig erneut die Arbeit auf. Für die Datenaufnahme
benötigt man lediglich ein einfaches Terminal-Programm, wie z. B.
Realterm, das die Daten entgegennimmt und abspeichert. Anschließend
können die Daten mit MS Excel oder ähnlichen Programmen ausgewertet und
visualisiert werden. Ein einfaches und sehr kurzes Makro für solch eine
Datenloggerfunktion lautet z. B. folgendermaßen:
S90 05 R04 L0200 >00
Die Erläuterung hierzu:

Jetzt
muss dieses Makro noch in den Makrospeicher ab Adresse 00 geschrieben
werden, was mit dem aus Tabelle 3 entnommenen Befehl V00{...} erfolgt:
V00{ S90 05 R04 L0200 >00 }
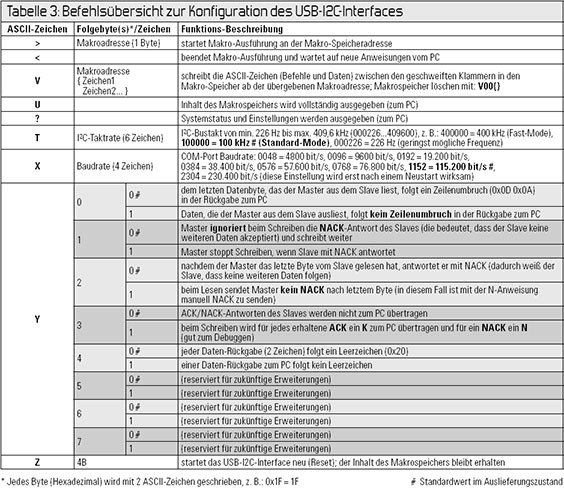
Sollen
die Messergebnisse als semikolongetrennte Werte direkt in Excel
eingelesen werden, so ist zuerst mit dem Konfigurationsbefehl Y01 aus
Tabelle 3 der automatische Zeilenumbruch nach jedem Datenbyte
abzuschalten. Anschließend müssen Semikolons zwischen die Datenbytes
eingefügt und jede Messperiode mit einem manuell eingefügten
Zeilenumbruch (Punkt) abgeschlossen werden. Das Ergebnis ist:
Y01
V00{ S90 05 R01;R01;R01;R01. L0200 >00 }
Die Textausgabe sieht dann (mit konstanten Messergebnissen) folgendermaßen aus:
A2; EA; F5; FF
A2; EA; F5; FF
A2; EA; F5; FF
A2; EA; F5; FF
Im
Downloadbereich zum USB-I2C-Interface befinden sich weitere
Anwendungsbeispiele, die die Verwendung der USBI2C- Befehle mit
I²C-Komponenten wie Echtzeituhr (DS1307), EEPROM (24C02),
8-Bit-I/O-Interface (PCF8574), Thermometer (DS75, LM75, TMP101)
demonstrieren.


Ihr
Herzstück ist der Mikrocontroller IC 1, ein ATmega88 mit integrierter
TWI-Schnittstelle (wie erwähnt, die Atmel-Entsprechung für I²C). Der
I²C-Bus ist mit je einem Pull-up-Widerstand für die SDA- und
SCL-Leitungen direkt am IC 1 angeschlossen. Die Spannungsversorgung der
Schaltung erfolgt über den USB-Bus (USB-powered). Dabei sind bis zu 500
mA verfügbar, da sich das USB-I2C-Interface als High-Power-Gerät am PC
anmeldet. So können hierüber auch die angeschlossenen I²C-Geräte mit bis
zu 450 mA versorgt werden. Der UART-USB-Treiberbaustein IC 2 von Silabs
(CP2102) beinhaltet alle für die USB-Schnittstelle wichtigen
Komponenten. Er kommuniziert per UART mit IC 1. Der TxD-Ausgang von IC 2
zum Mikrocontroller führt einen 3,3-V-High-Pegel, was unter Umständen
für den mit 5 V betriebenen ATmega88 zu gering sein kann, weshalb als
Pegelwandler zwei CMOS-Inverter (IC 3) dazwischengeschaltet sind. Die
5-V-Eingangsspannung von IC 1 ist für den CP2102 (IC 2) dagegen kein
Problem. Der I²C-Bus ist parallel an 3 Stiftleisten ST 1, ST 2 und ST 3
geführt. Diese sind auch mit der 5-V-USB-Spannung verbunden. Als
Sicherheitselement zur Absicherung des USB-Ports gegen eine zu hohe
Stromaufnahme dient R 1 – ein PTCSicherheitselement, das im Fehlerfall
den Strom an ST 1 bis ST 3 begrenzt. Die Ferrite L 1 und L 2 dienen zur
Unterdrückung von Störungen, die auf der Spannungsversorgungsleitung
auftreten könnten.
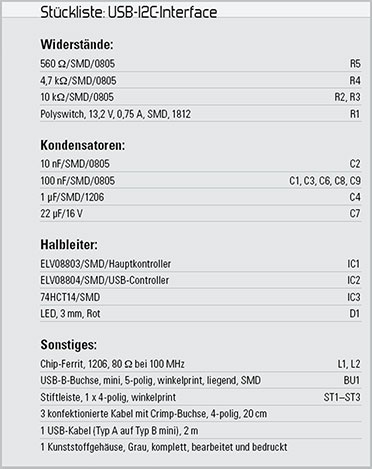
Nachbau
Der Aufbau des Interfaces ist schnell erledigt, da alle SMDBauteile bereits ab Werk bestückt sind. Es bleibt noch die Bestückung weniger bedrahteter Bauteile. Dabei beginnen wir mit ST 1/2/3, die wie im Platinenfoto zu sehen, zu bestücken und auf der Platinen-Lötseite zu verlöten sind. Dabei sind die Lötstellen sorgfältig auszuführen und es ist darauf zu achten, dass die Kunststoffträger der Stiftleisten plan auf der Platine aufliegen. Es folgt der Elko C 7, der polrichtig zu bestücken ist, nachdem man zuvor seine Anschlüsse abgewinkelt hat. Die Polungsmarkierung des Elkos erfolgt üblicherweise am Minuspol. Abschließend ist D 1 zu bestücken. Auch hier ist auf die richtige Polung zu achten, der längere Anschluss ist die Anode (+). Die LED ist so einzulöten, dass sich eine Einbauhöhe von 11 mm von der Platinenoberfläche bis zur LED-Spitze ergibt. Nach einer abschließenden Kontrolle auf Löt- und Bestückungsfehler erfolgt der Einbau in das Gehäuse. Dazu wird die Platine in die Gehäuseunterschale eingelegt, so dass die Buchsen exakt in den vorbereiteten Ausschnitten liegen. Nun ist die Gehäuseoberschale aufzulegen und mit den beiliegenden zwei Schrauben zu verschrauben. Für den Anschluss eigener I²C-Slave-Komponenten an das Interface liegen dem Bausatz drei Buchsen mit fertig konfektionierten Kabeln bei. Diese haben auf der Oberseite einen Verpolungsschutz, der genau in die Gehäuseöffnungen passt. Die Belegung der Adern ist direkt auf das Gehäuse aufgedruckt (rotes Kabel = +5 V, blaues Kabel = GND). Hierüber kann ein einfacher Anschluss an das Interface erfolgen und der Kommunikation zwischen PC und I²C-Geräten steht nichts mehr im Wege!Internet:
[1] http://www.nxp.com/acrobat_download/usermanuals/UM10204_3.pdf
[2] http://www.roboternetz.de/wissen/index.php/I²C
[3] http://realterm.sourceforge.net/#I²C%20Bus
[4] http://www.der-hammer.info/terminal/index.htm
[5] http://www.nxp.com/acrobat/datasheets/PCF8591_6.pdf

Fachbeitrag online und als PDF-Download herunterladen
Inhalt
Sie erhalten den Artikel in 2 Versionen: als Online-Version
als Online-Version als PDF (8 Seiten)
als PDF (8 Seiten)Sie erhalten folgende Artikel:
- PC-USB-I2C-Interface
- 1 x Journalbericht
- 1 x Schaltplan
| Produkte | Foren |

Hinterlassen Sie einen Kommentar:


